Robot-Forager Tutorial
In this tutorial, you will learn how to build a very simple model in Cormas.
General presentation
This model is inspired by an article by Steel (1989) in which robots are tasked with recovering ore from the environment and bringing it back to a specific location. Steel explains: The paper discusses some issues in the cooperation between distributed agents using the following case study: The objective is to explore a distant planet, more concretely to collect samples of a particular type of precious rock. The location of the rock samples is unknown in advance but they are typically clustered in certain spots. There is a vehicle that can drive around on the planet and later reenter the spacecraft to go back to earth. There is no detailed map of the terrain although it is known that the terrain is full of obstacles, hills, valleys, etc.
The case study is designed to require autonomy. It is not feasible to plan and steer the whole thing out of earth because communication from and to the planet has a considerable time delay and may be cut off during certain periods. Although one solution could be that the vehicle itself wanders around and collects the rocks, it is obvious that a larger terrain could be covered much more quickly if there is a group of mobile robots that perform the task of searching and carrying the rocks to the vehicle. This would make the solution also less fault-tolerant because loss of one robot is not fatal. Because the desired samples are clustered in certain spots, the robots better cooperate to accomplish the task. This give us the problem addressed in this paper : how can these distributed robots cooperate to find samples and to carry them to the collecting vehicle. If the present case study seems somewhat far fetched, the cleanup of toxic waste or household garbage collection can be viewed as comparable talks.
Steels, Luc. 1989. Cooperation Between Distributed Agents Through Self-Organisation. Pages 175–196 of : Demazeau, Yves, & Müller, Jean-Pierre (eds), Decentralized A.I. : Proceedings of the First European Workshop on Modelling Autonomous Agents in a Multi-Agent World (MAAMAW-89), Cambridge, England, August. Amsterdam, North-Holland : Elsevier Science Publishers. This paper is available here.
For the first version of this tutorial, the model the model has been made even simpler: the base to recover all the ore is not considered. Robots do not have a maximum capacity and do not leave marks when carrying ore. Here is a class diagram for this version:
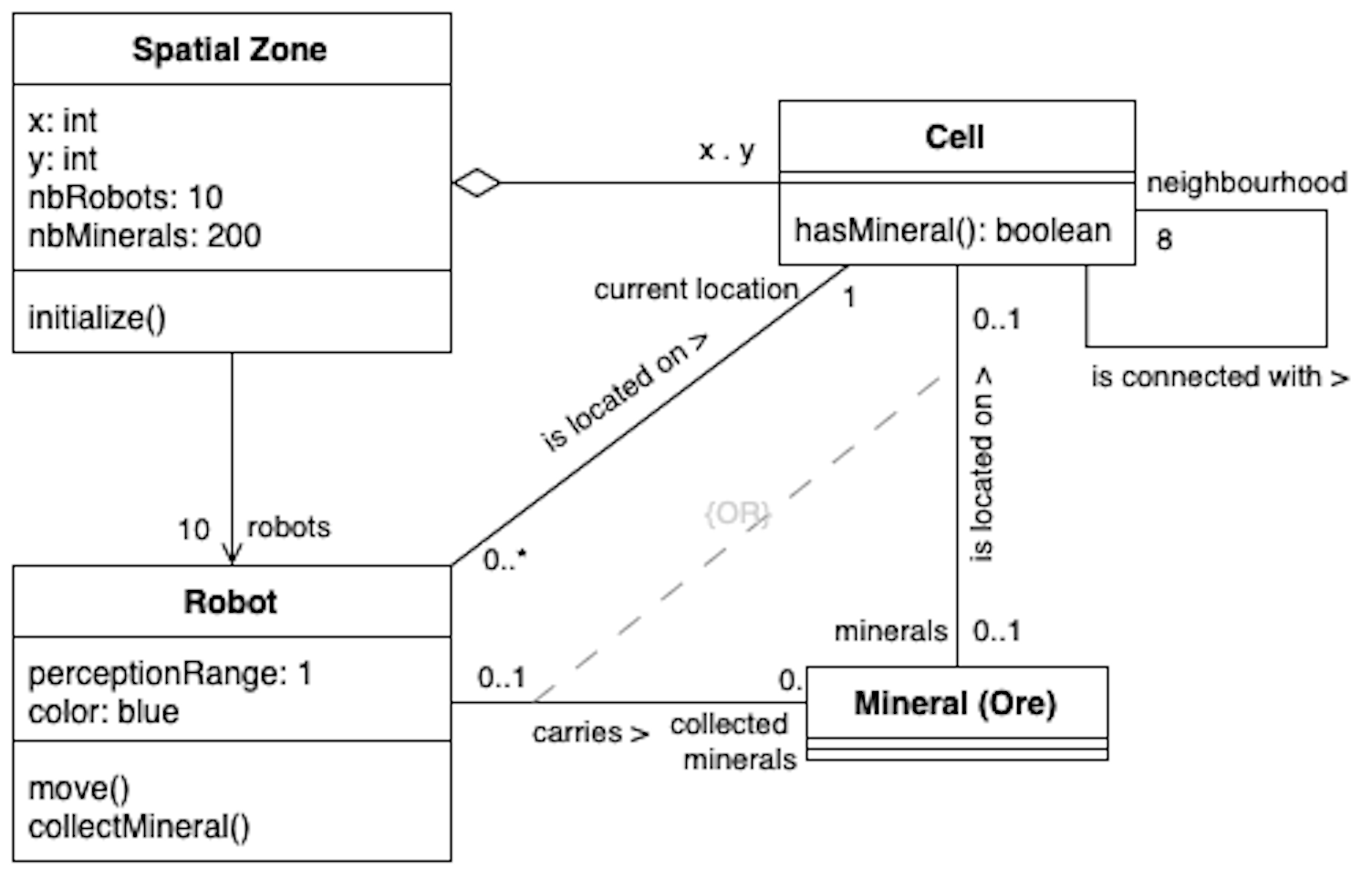
As the spatial zone is the full grid of the space, this model is composed of three elements:
- A square grid of cells
- Minerals that can be located in those cells
- Robots that move across the cells and collect minerals
The complete implementation can be found in our robot-forager-model repository.
To make the model description more precise:
- Multiple robots should never appear on the same cell
- Multiple minerals should never appear on the same cell
- When model is initialized, first we generate robots and then minerals. A mineral cannot be generated on a cell where robot is located.
At each simulation step, all robots perform two actions:
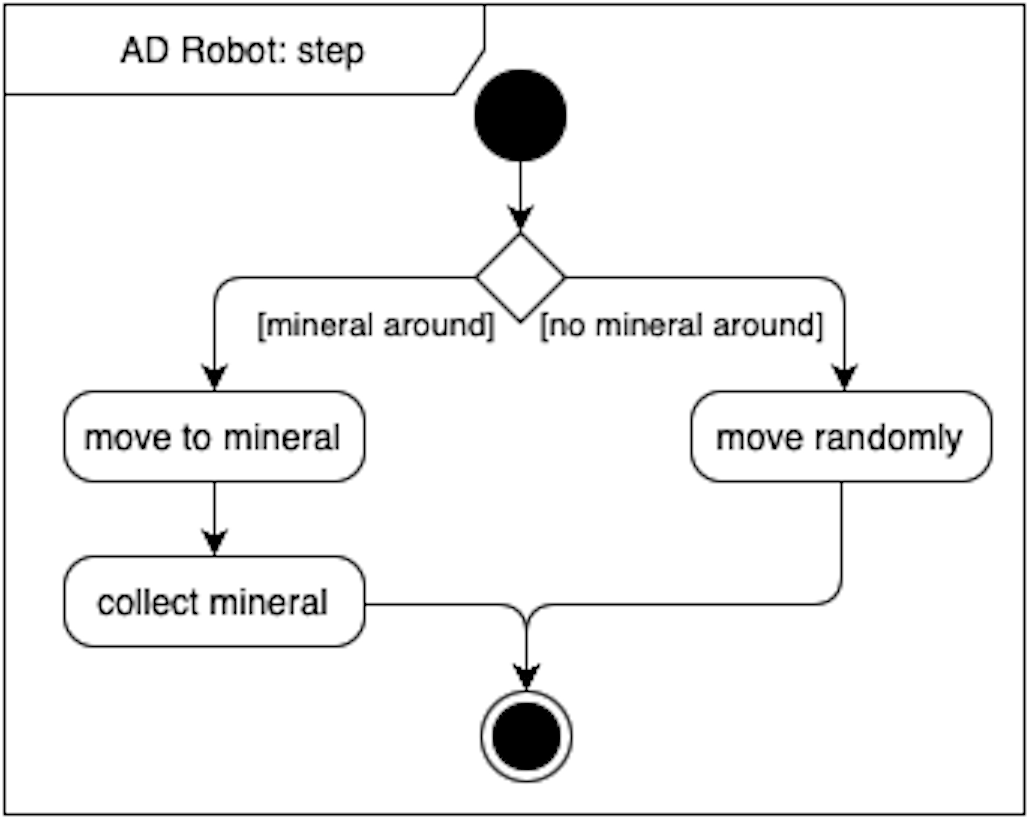
- Move. Look around at 8 neighbor cells, if any one of them contains a mineral, move to that cell. If no neighbor has minerals, then move randomly to any of the 8 neighbors.
- Collect minerals. Look at the cell on which robot is located (after moving). If this cell has a mineral, then collect it (add it to robot’s inventory and remove it from the cell) Otherwise do nothing.
Robots perform their actions asyncronously, meaning that as soon as the robot sees a mineral, it moves to the nighbour cell and collects the mineral, without waiting for other robots to make their decision. If this was not the case, we could arrive at a situation when two robots move to the same cell to collect the same mineral.
We will implement two environments:
- Small environment: 5x5 cells, 2 robots, 20 minerals
- Large environment: 27x27 cells, 10 robots, 200 minerals.
Step 1. Create a new model
If you haven't donne so already, you can Install Cormas then open a Cormas image. Click on "Cormas" menu in the top left corner and select "New Model".

Type the name of your model. In our case, we will call it "Robot forager". All classes in Pharo exist in the same namespace, which means that every class must have a unique name. To ensure this, we follow a good practice of adding a project-specific prefix to every class name. Cormas will automatically suggest a prefix for your model classes, in our case, it suggests "RF". Feel free to edit this prefix. Then, Cormas will also propose a name for the model class. Typically, it's prefix + the word "Model", so in our case, the class name will be "RFModel". In the bottom part of the window, you will see the packages and classes that will be generated for you. By default, Cormas will also generate an empty test class and a baseline (baseline is a special class that specifies what are the packages and external dependencies of your project and how it can be loaded into another Pharo image). We also add a simple description for our model using Microdown (you can also write it in Markdown or in plain text).
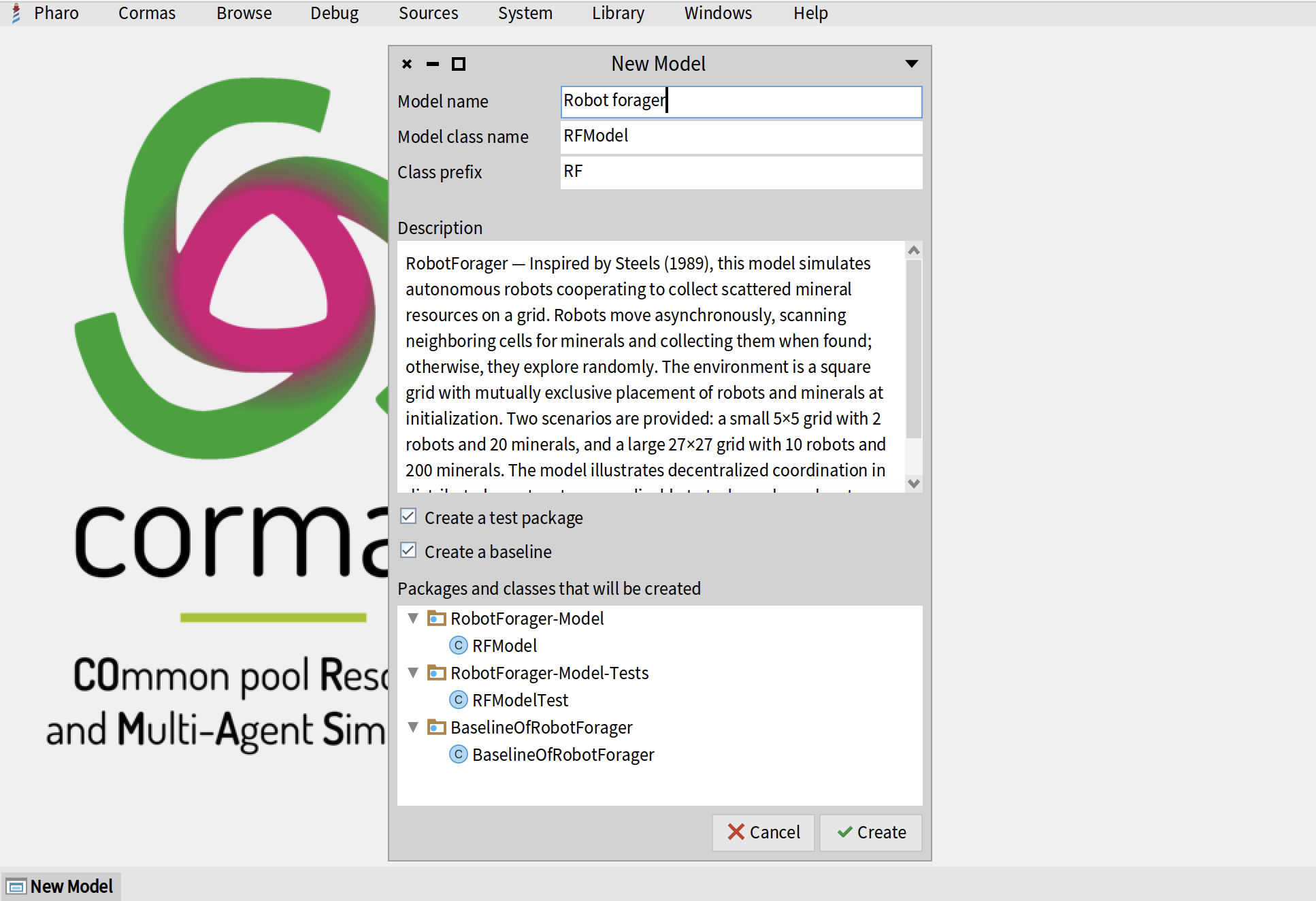
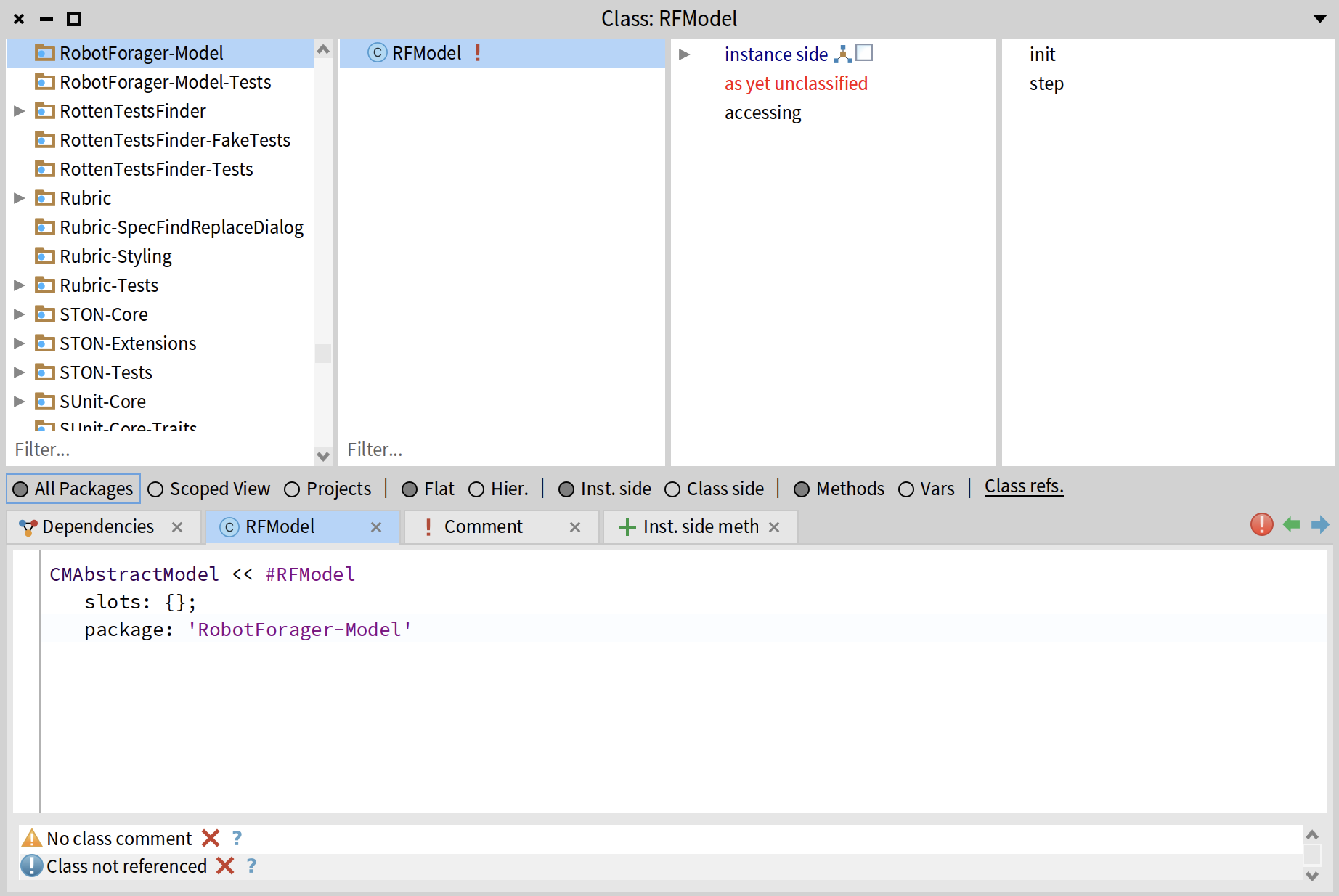
Once you click on "Create" button, Cormas will generate a package RobotForager-Model with a class RFModel, a package RobotForager-Model-Tests with a class RFModelTest, and a package BaselineOfRobotForager and a class with the same name. If everything goes well, a System Browser will open on RFModel class. Now we can start coding!
Step 2. Create a Cell class
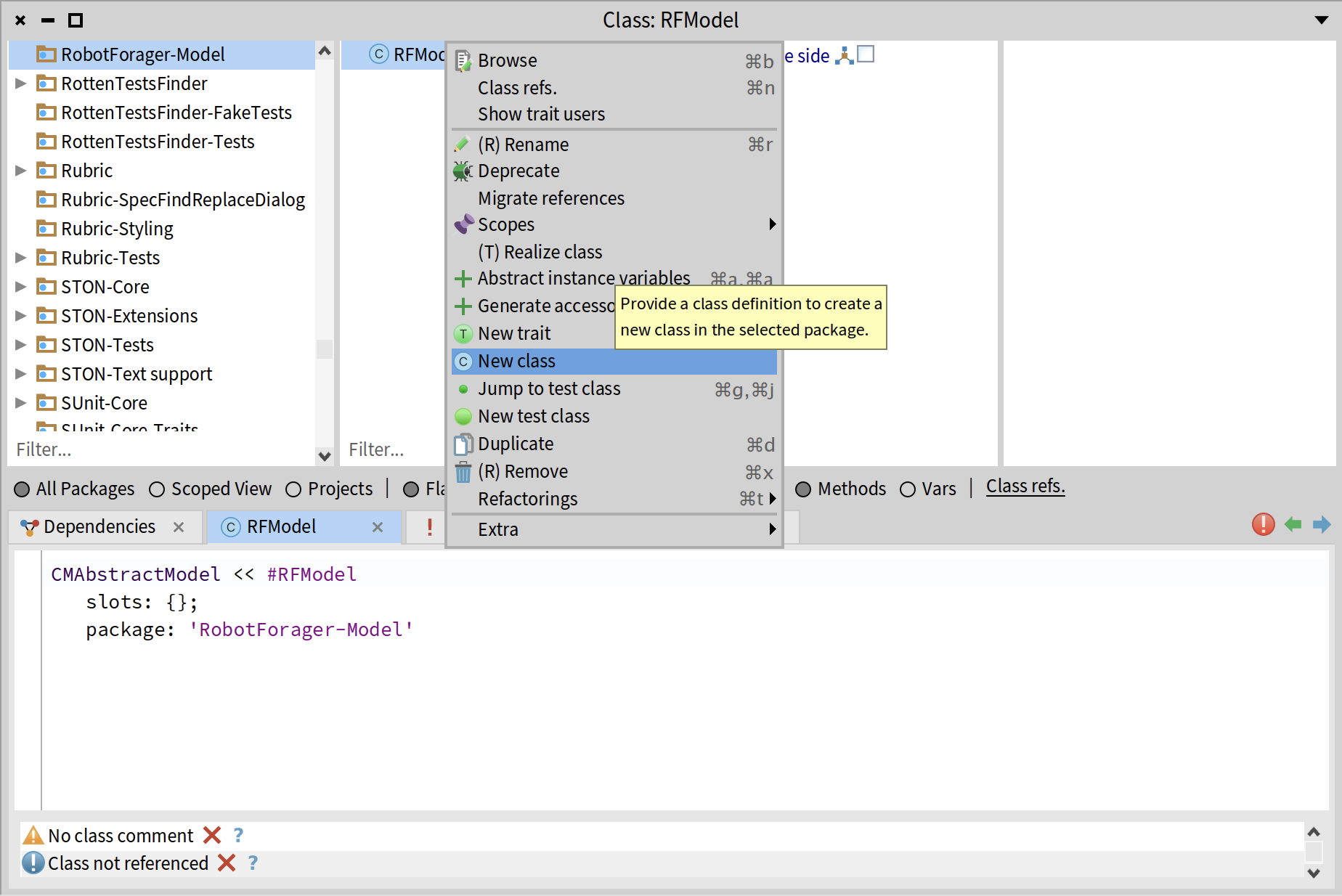
We will start by creating a class for a cell of our spatial grid. Cell will define a location where robots and minerals can be located. To create a new class, you can right-click on any of the existing classes and select "New class" from the menu. You will see a window with a template class definition.
Alsternatively, you can edit the definition of any existing class in the bottom part of the System Browser. As soon as you change the name and hit "Save" (Ctrl+S on Windows and Linux or Cmd+S on Mac), the new class will be created.
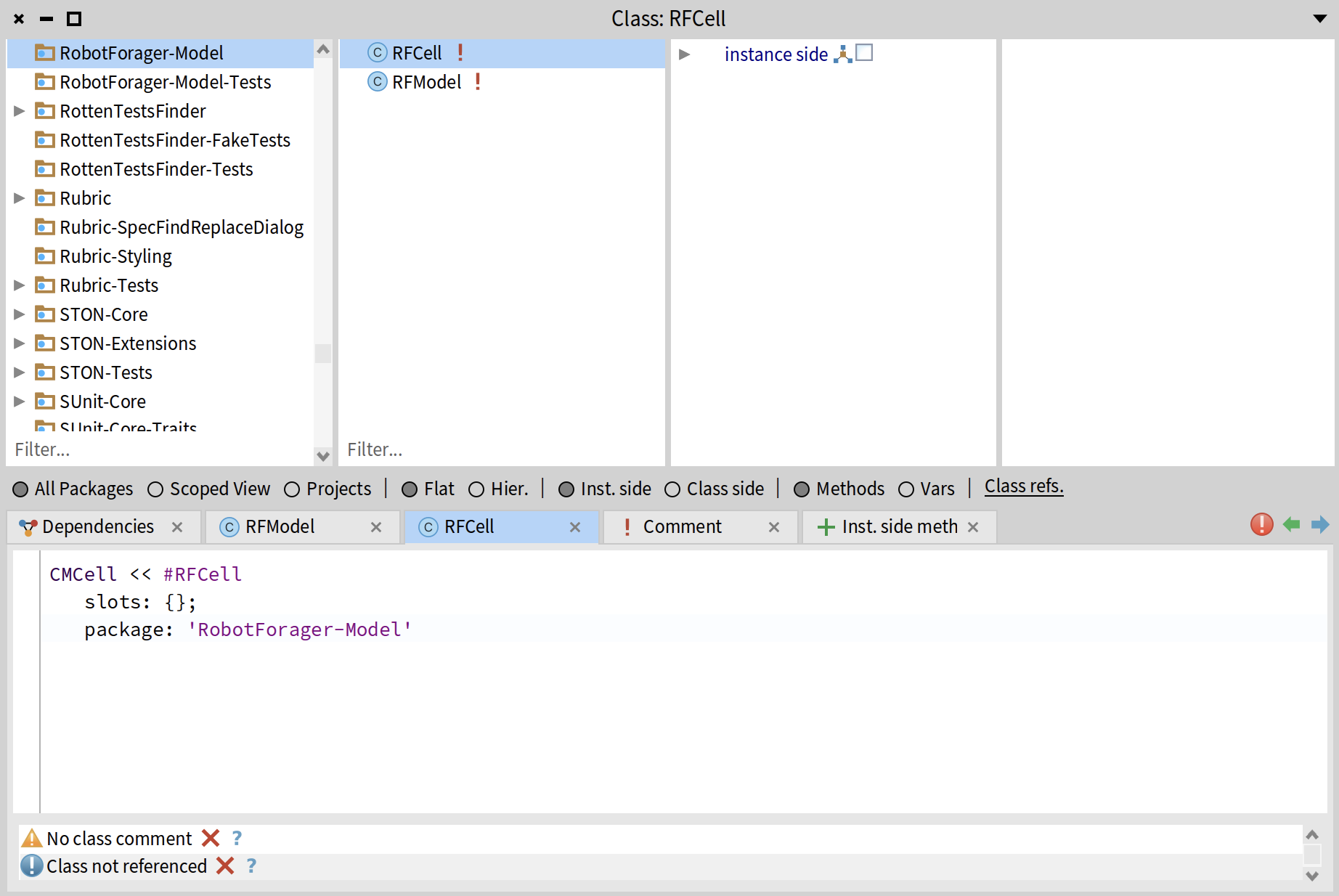
In our case, the cell class will be called RFCell (remember to use the prefix!) and it will be the subclass of CMCell - a default superclass for spatial cells in Cormas.
CMCell << #RFCell
slots: {};
package: 'RobotForager-Model'
In our model, cells will do nothing, which is why we do not need to implement any methods for this class. By default, cells will be represented as gray squares.
Step 3. Create a grid
Now we are ready to create a spatial grid and have a first look at our simulation. To do that, we have to make sure that the model class has at least one "init" method which defines the initial scenario for our simulation and at least one "control" method which defines what happens at each step of the simulation.
Every new model that is generated by Cormas contains the default templates of those two methods. The default init method contains an example of defining a 4x4 square grid with 8 neighbours of each cell and an open (thoroidal) environment. The last two lines are commented out - they provide examples for generating agants and positioning them randomly on the grid.
init
<init>
"This method is used to define the initial environment of a simulation. It will be executed once when the simulation is initialized."
"Example of a 4x4 rectangular grid"
self
createGridNumberOfRows: 4
numberOfColumns: 4
neighbourhood: 8
closed: false.
"Example of creating agents and randomly positioning them on a grid"
"self createN: 3 randomlyLocatedEntities: YourAgentClass1.
self createN: 3 randomlyLocatedAloneEntities: YourAgentClass2."
The default control method is empty. It is simply a placeholder for defining a simulation step:
step
<control>
"This method will be executed at every step of the simulation"
As we discussed at the beginning of this tutorial, we want to implement two environments: a big one with 27x27 grid and a small one with 5x5 grid. We will start with the small environment. Create a new method in the RFModel class and call it initSmall. We must add a pragma <init> to tell Cormas that this is one of the "init" methods. Then we use a method provided by the superclass to define the spatial grid. We specify the number of rows and columns, the size of the neighbourhool (in this case, there are two options: 4 or 8; neighbourhood of size 4 means that only north, south, east, and west cells are considered as neighbours; neighbourhood of size 8 includes diagonal cells such as north-east, north-west, etc.). Finally, we pass true as a last parameter telling Cormas that the environment should be closed - the agents won't be able to walk over the edge of the grid (if the environment is "open", the agents can cross the left edge and appear on the right or cross the top edge and appear in the bottom.
initSmall
<init>
self
createGridNumberOfRows: 5
numberOfColumns: 5
neighbourhood: 8
closed: true.
We must create at least one "control" method. We will call it step and leave it empty for now. We add a pragma <control> to tell Cormas that this is one of the control methods.
step
<control>
"do nothing"
Step 4. First look at a simulation
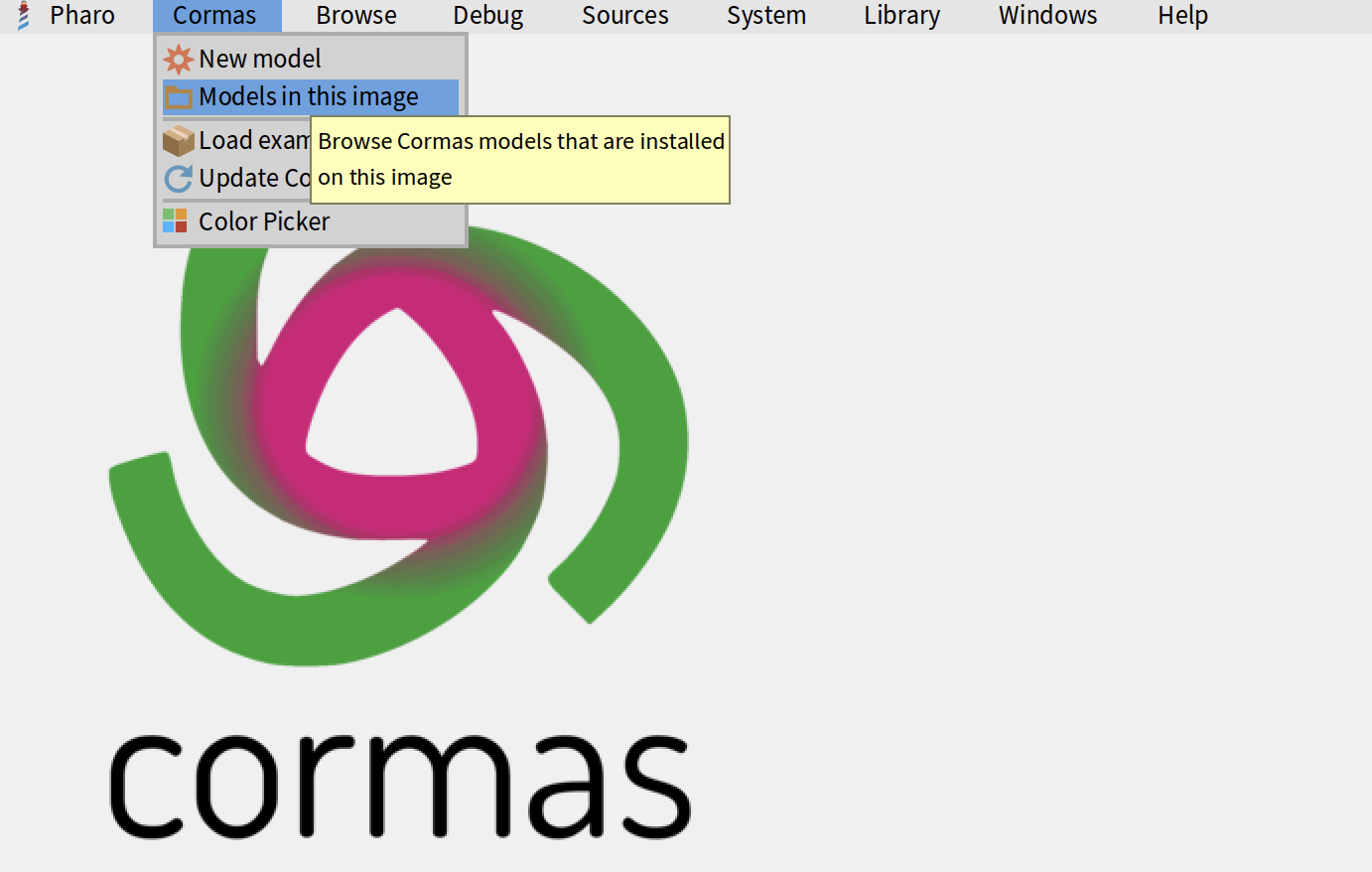
Now we can open the simulation view and take a first look at our model. Select "Models in this image" from the "Cormas" menu in the top left corner.
Then select your model from the list (in our case, it's RFModel) and click on "Open Simulation" button.
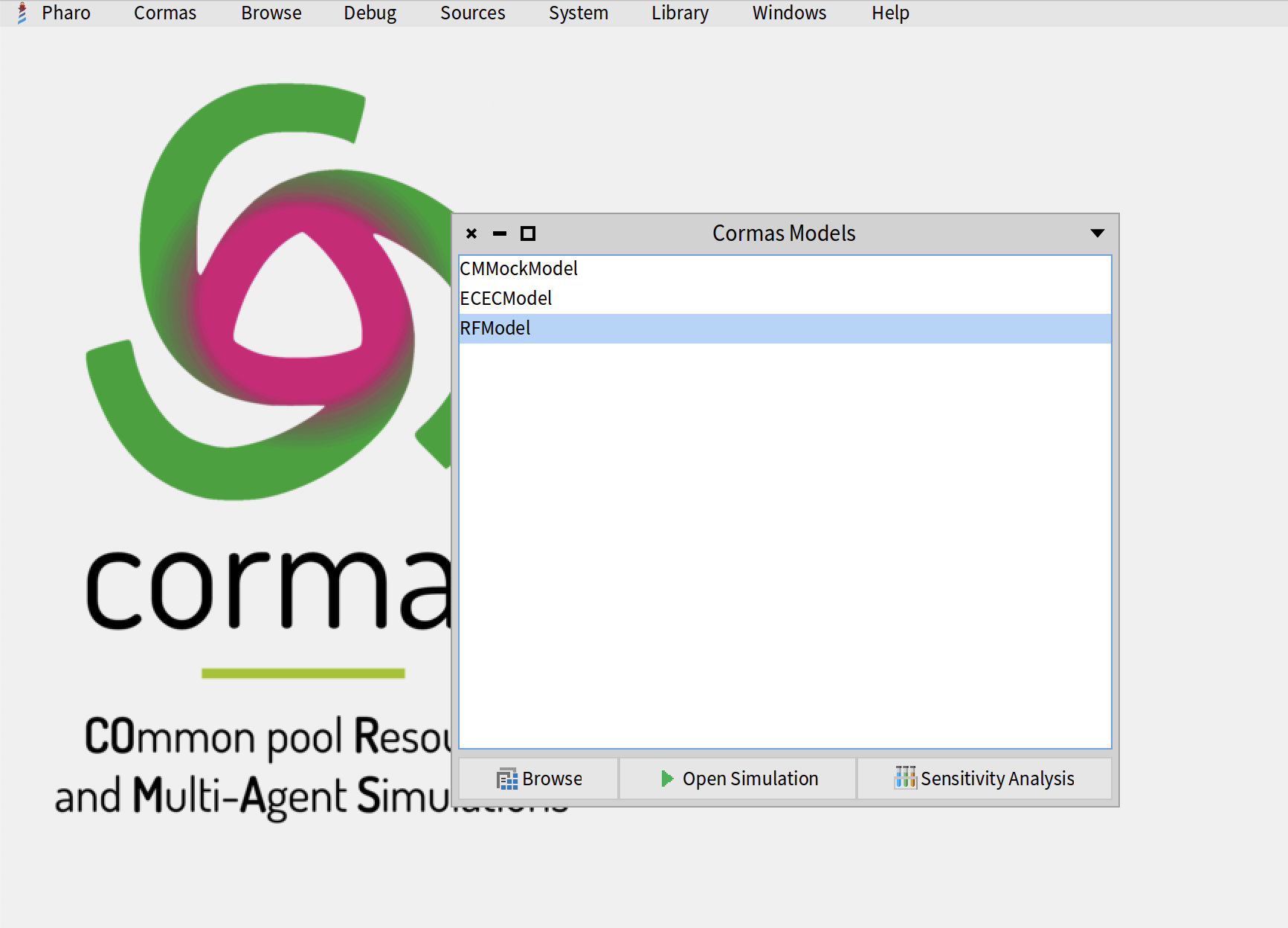
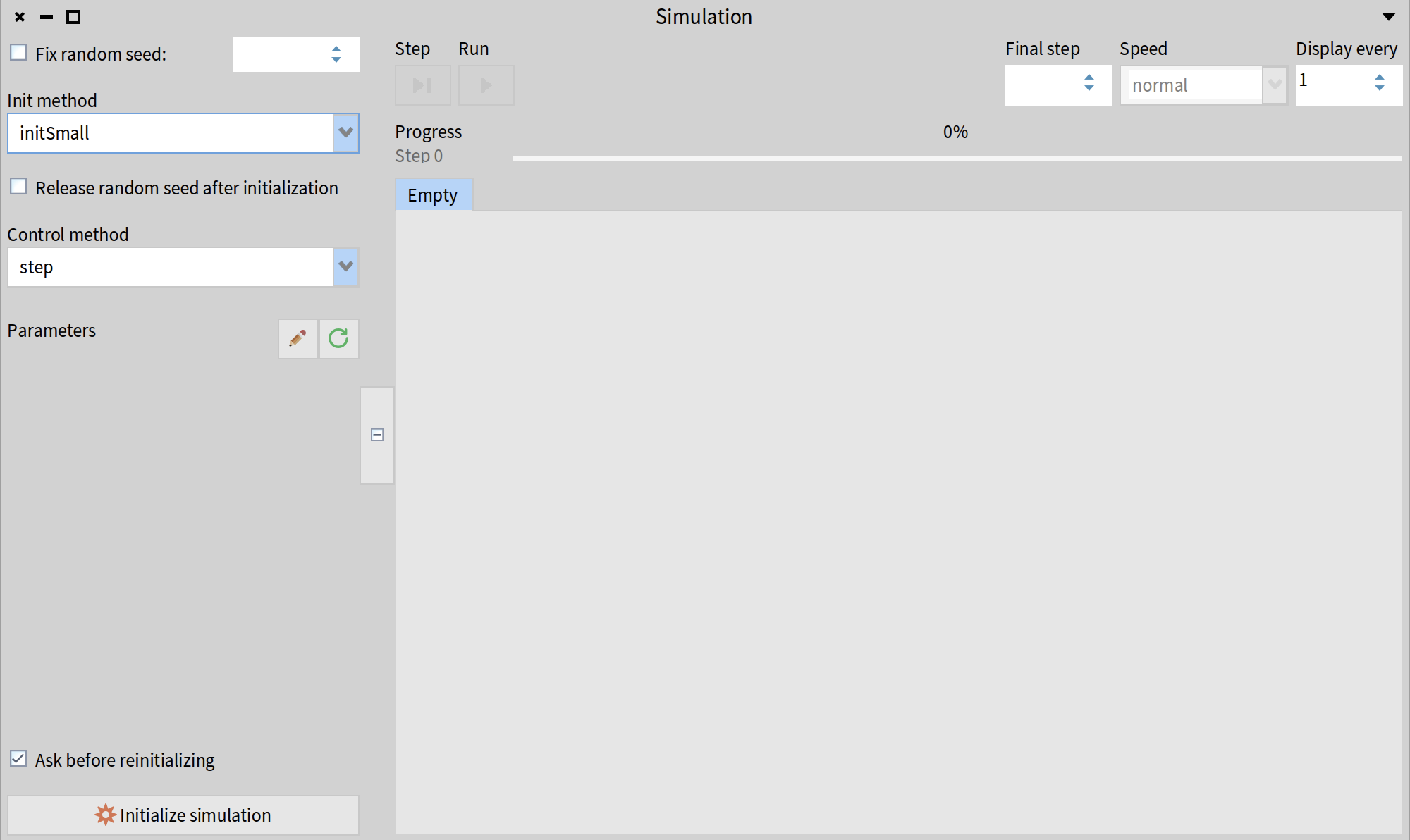
You will see the Cormas Simulation browser. The left side allows you to initialize the simulation. Here you can select the "init" and "control" methods that will be executed, fix the random seed, modify parameters of the model (we don't have any parameters at this point). The right side of the window is currently empty because the simulation was not initialized yet.
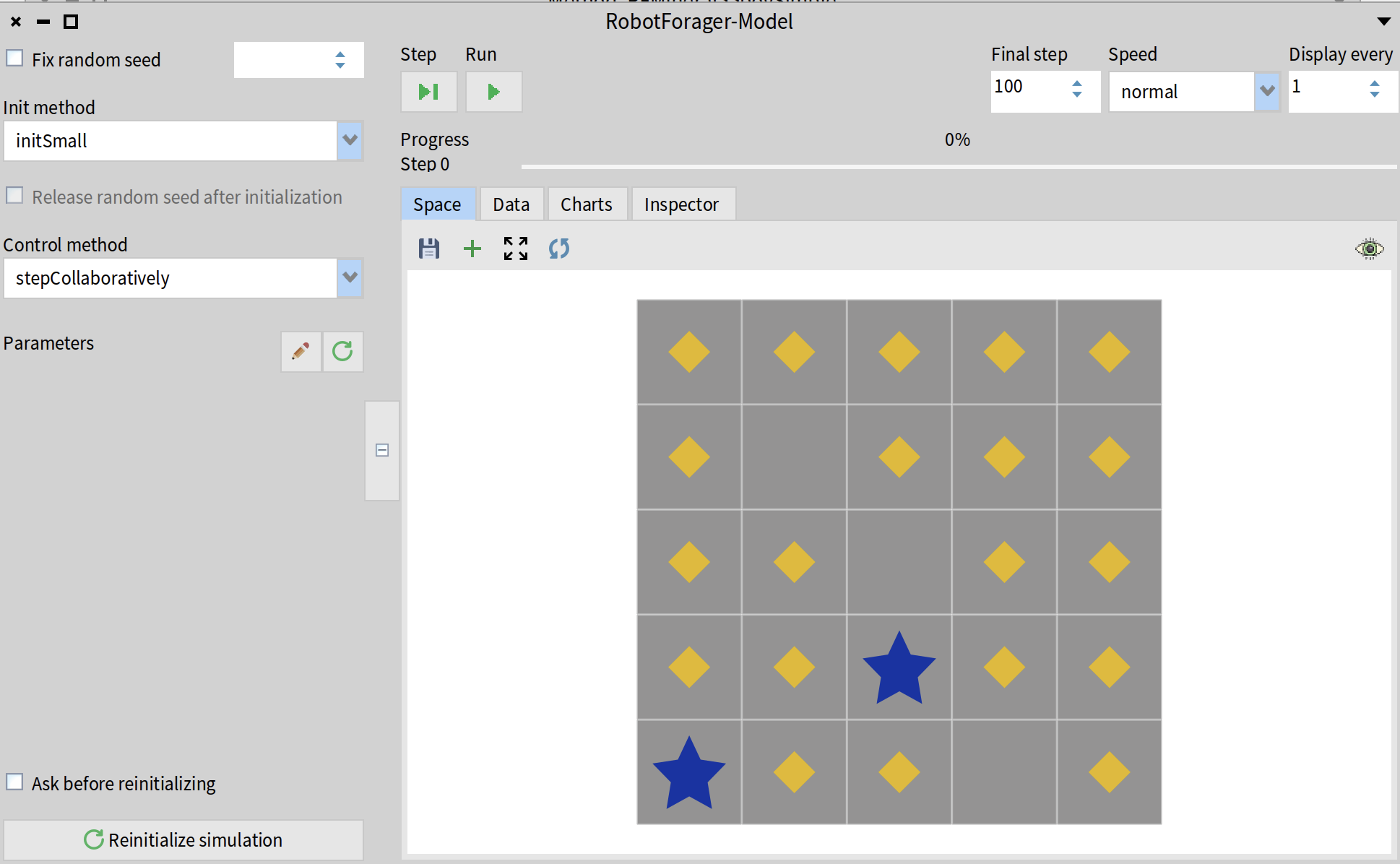
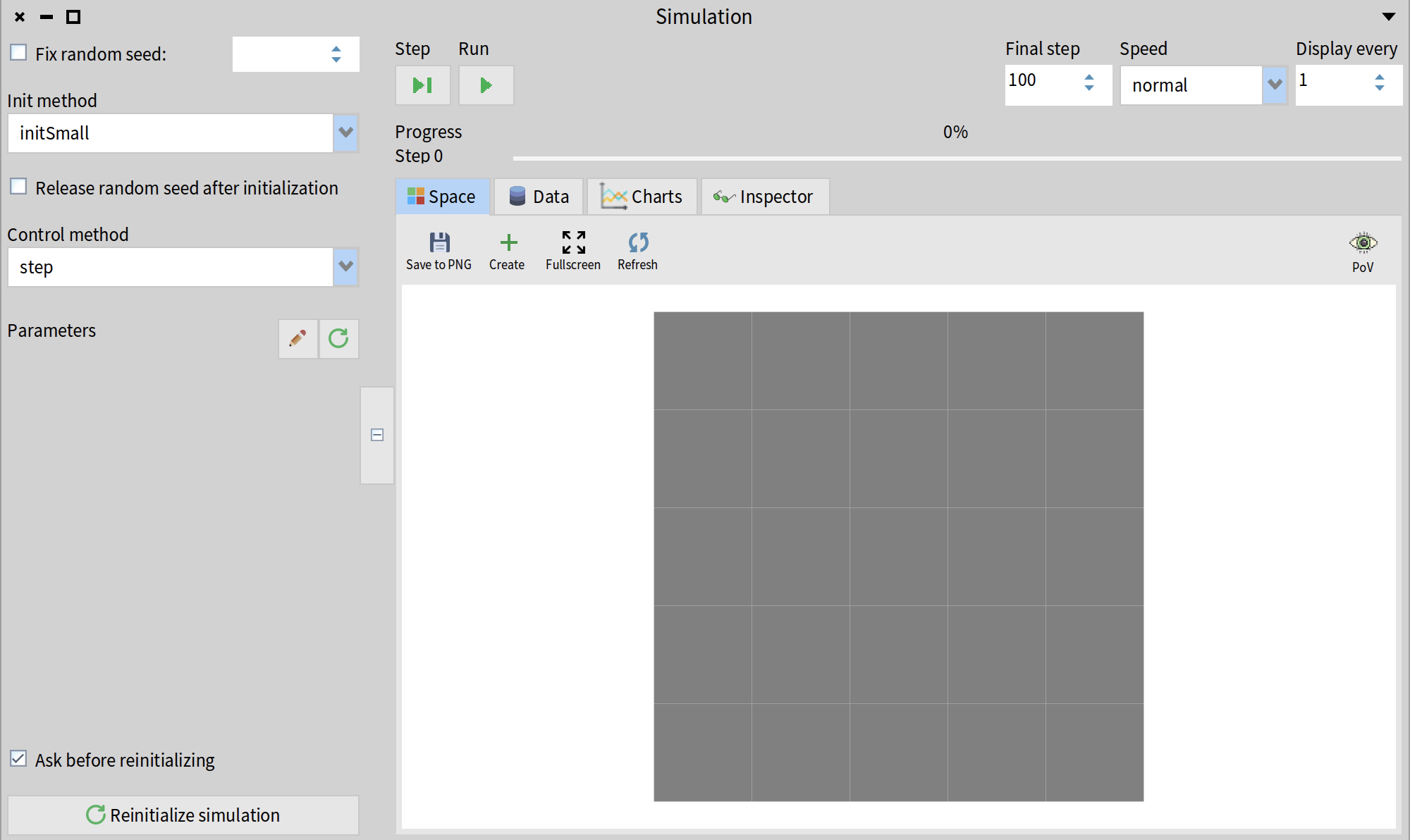
In our case, we have only one "init" method: initSmall anb only one "control" method: step. They are selected by default, so you can simply click the "Initialize simulation" button. You will see a 5x5 grid with instances of RFCell class that were created in the initSmall method. Every cell is gray because this is the default color in Cormas. If you click on "Step" button in the top part of the Simulation window, the "control" method (in this case, step) will be executed. Our step method is empty, so nothing will happen.
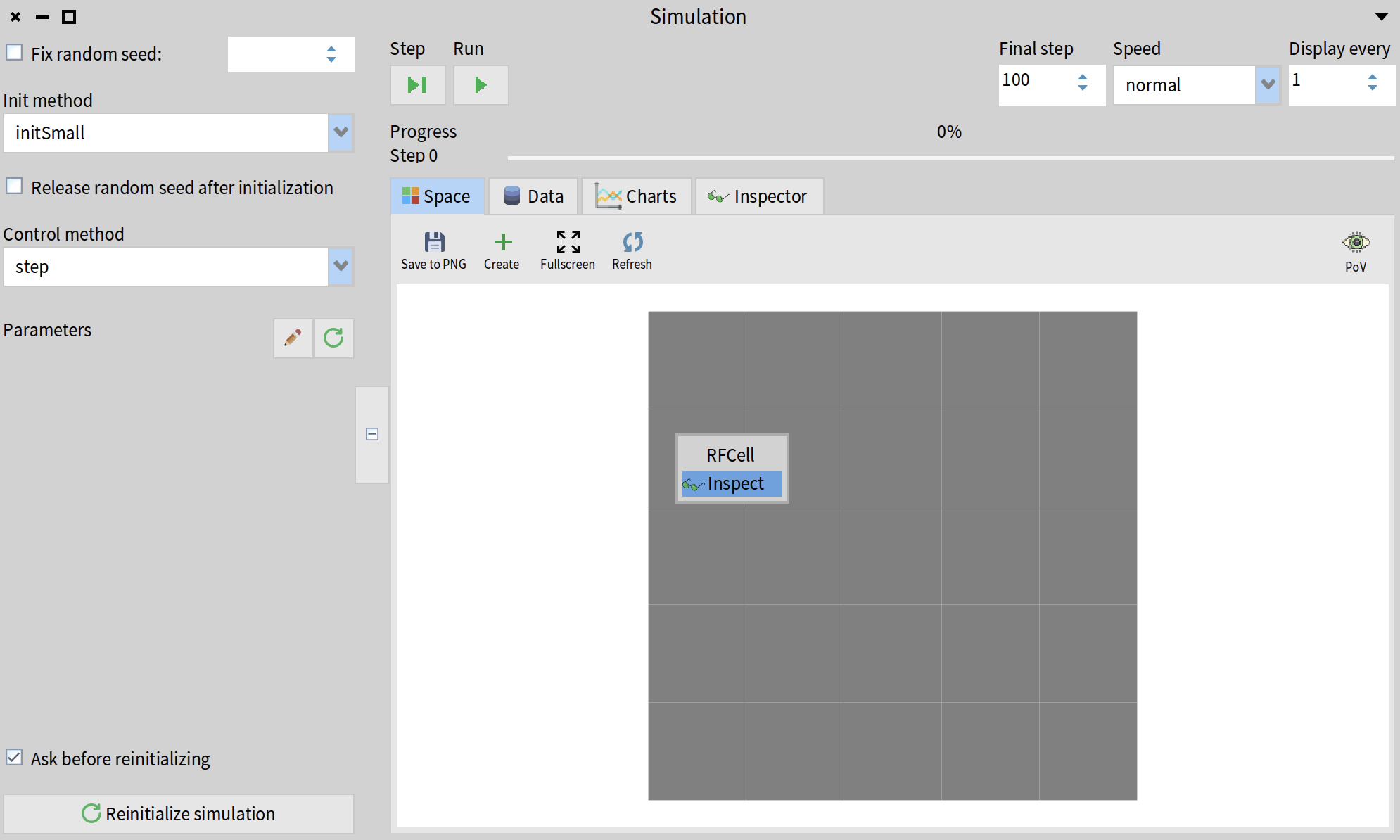
Every cell is a live object, you can right-click on it and select "Inspect" from the menu. This will open an interactive inspector for the selected cell.
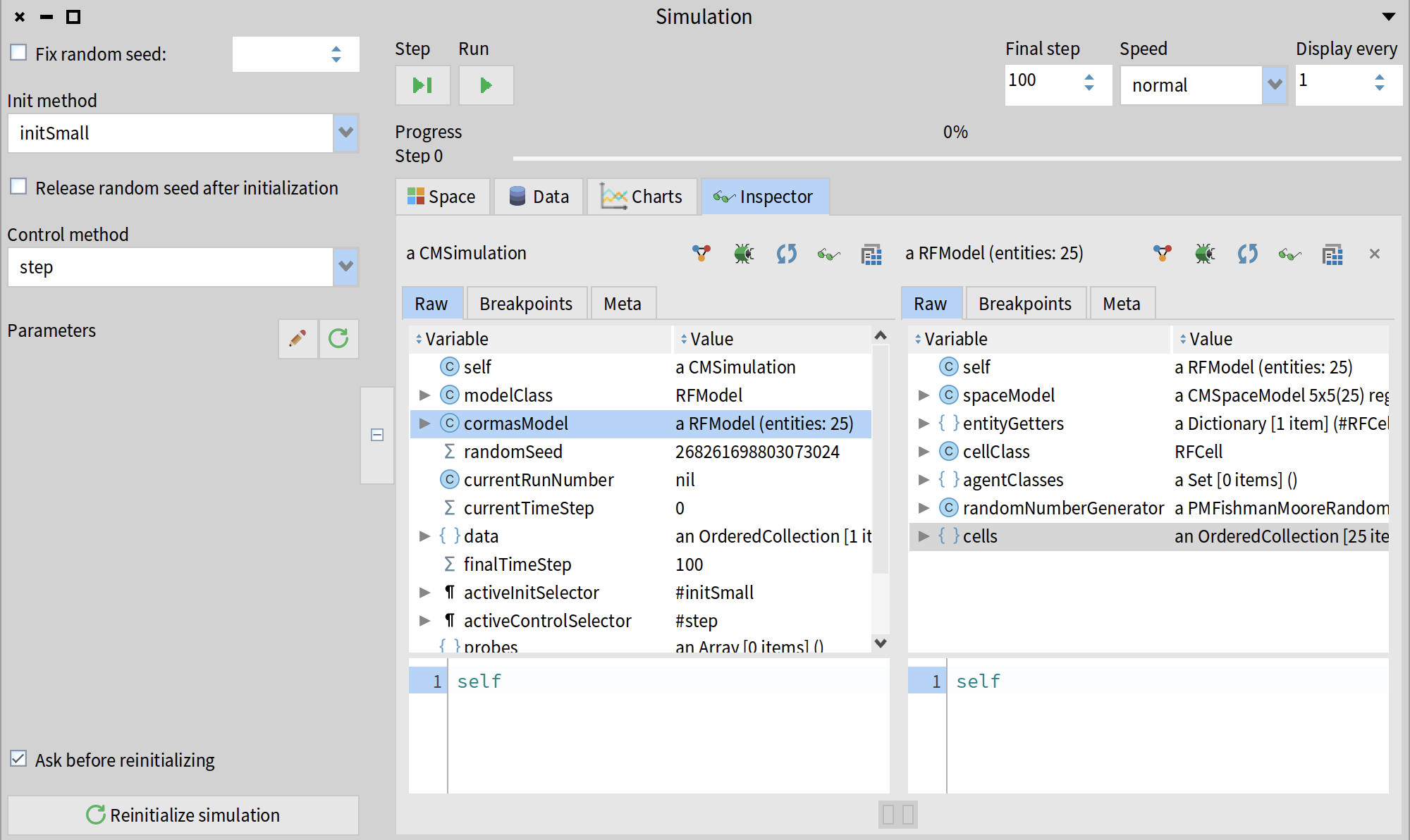
You can also select the "Inspector" tab of the Simulation window. This will open the inspector of the simulation object. This object has an instance variable called cormasModel. If you click on it, you will open an inspector of your RFModel instance in a separate pane. If you click on the cells variable, you will inspect the collection of cells.
Step 5. Add robots
Open SystemBrowser again and create a new class called RFRobot. It should be a subclass of CMAgent - a common superclass for all Cormas agents.
CMAgent << #RFRobot
slots: {};
package: 'RobotForager-Model'
We add a "pov" (point of view) method to describe how the agent should be visualized on the grid. Cormas allows you to define many different points of view methods and change them while the simulation is running. We will call this method pov but you can choose any name you like. The only requirement is to include a <pov> pragma. Our method will return an instance of a CMPointOfView class specifying that the color of our agents should be blue, the shape should be a "star", and the size should be 0.6 (60% of the cell; default size is 0.3). We will use the colors defined in CMColor class instead of the standard Pharo Color because they are more aesthetic.
pov
<pov>
^ CMPointOfView
color: CMColor blue
shape: #star
size: 0.6
Now we add one line to the end of our initSmall method telling Cormas to create two robots located randomly on the grid but only in those cells that are not occupied by other agents (the cells where robots would be "alone".
initSmall
<init>
self
createGridNumberOfRows: 5
numberOfColumns: 5
neighbourhood: 8
closed: true.
self createN: 2 randomlyLocatedAloneEntities: RFRobot
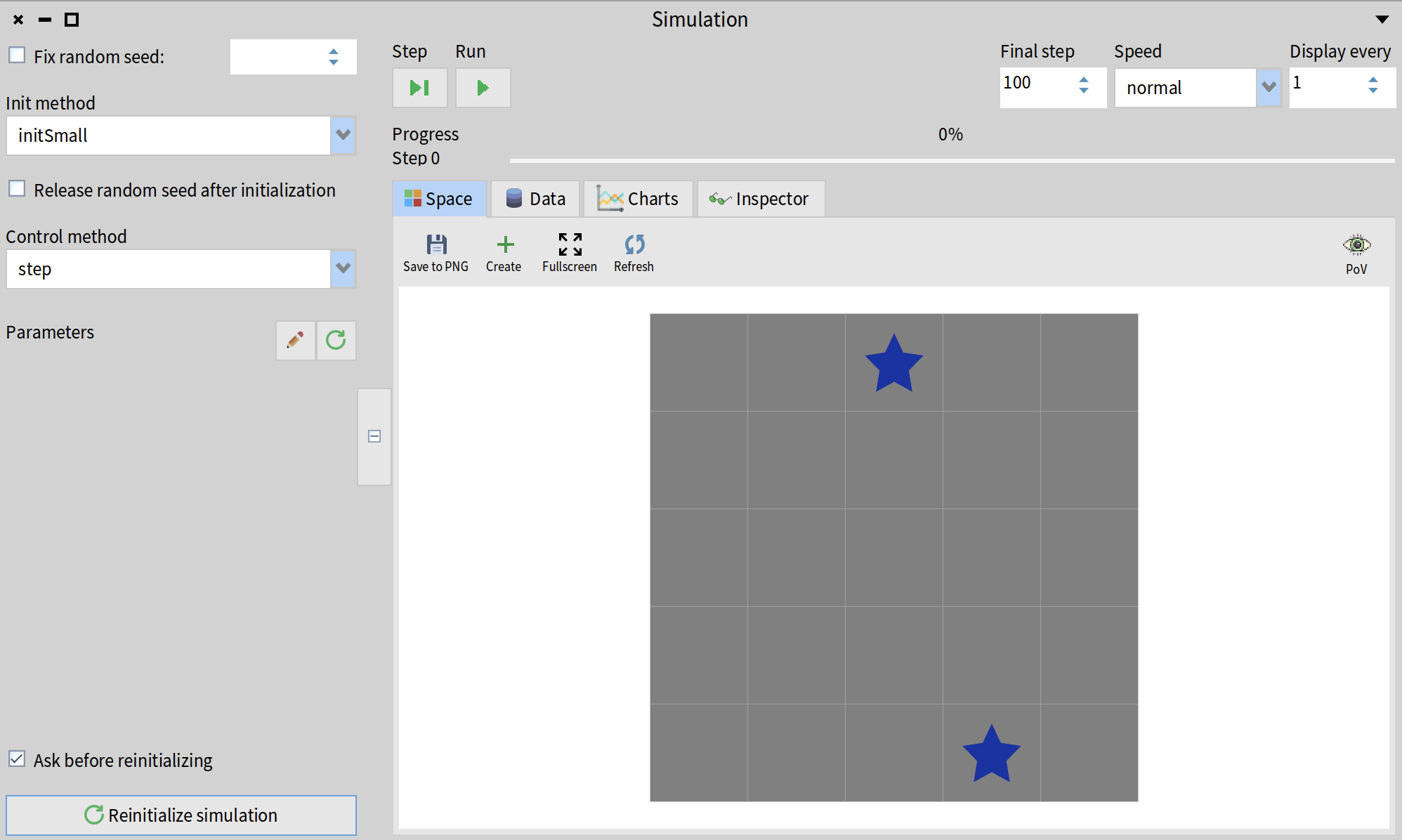
Now, when you open (or simply re-initialize) your simulation, you should see two robots located somewhere on the grid.
Congratulations! You have created your first agents :) At this point, they are not doing anythig other than simply "exist" in your simulation. In the next step, we will define a first action for our robots.
Step 6. Make robots move
Actions are special methods that autonomous agents can "perform" during the simulation. The first action that we will define for our robots will be called moveRandomly - as the name suggests, it will make robots move randomly on the spatial grid. We add a pragma <action> to tell Cormas that this is an "action" method. We will call a method randomWalk provided by the trait TCMLocated. This method will make simply select a random neighbouring cell and make the robot move there.
moveRandomly
<action>
self randomWalk
Now we modify the step method of RFModel to ask all robots to move randomly at each step of the simulation.
step
<control>
robots do: [ :each | each moveRandomly ]
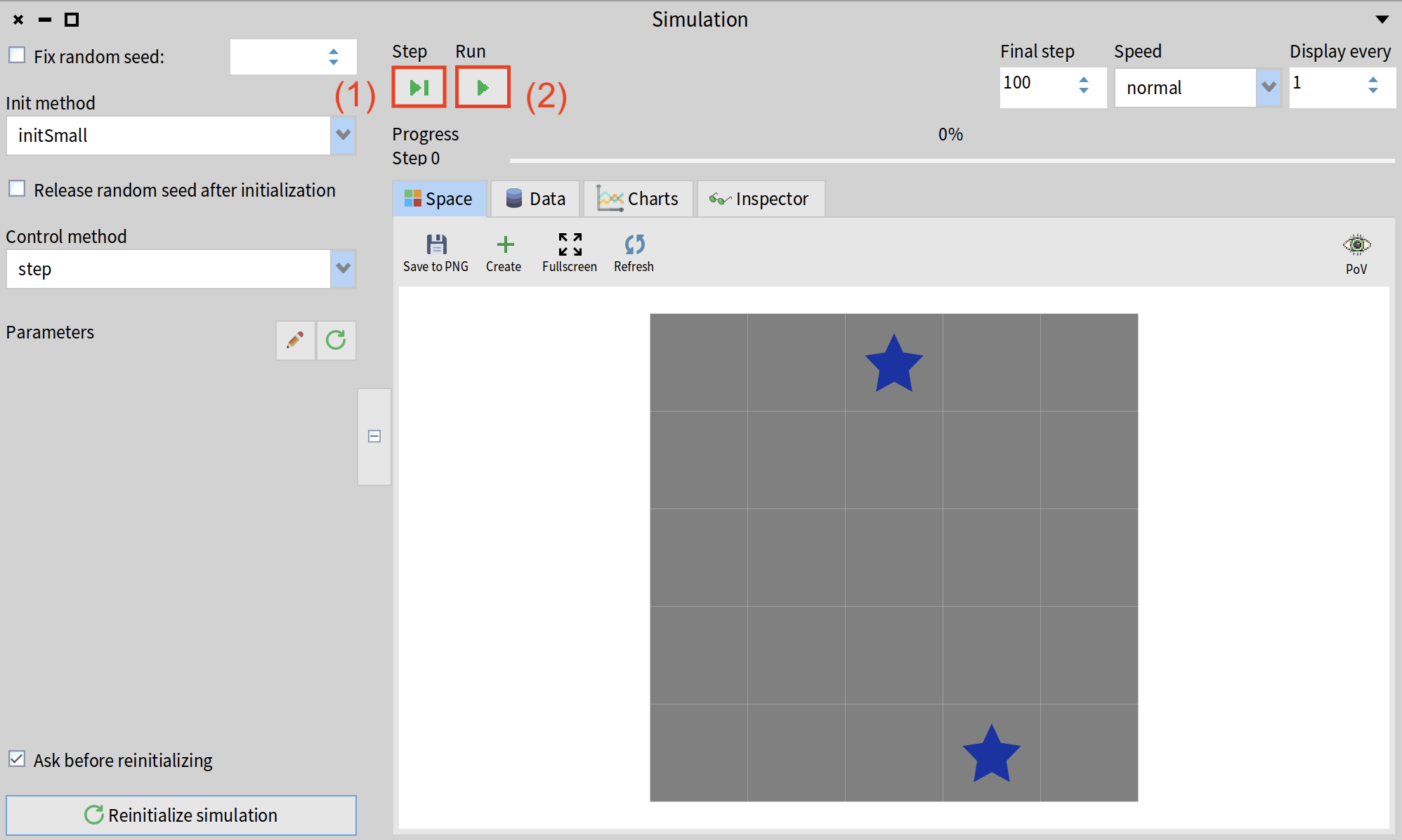
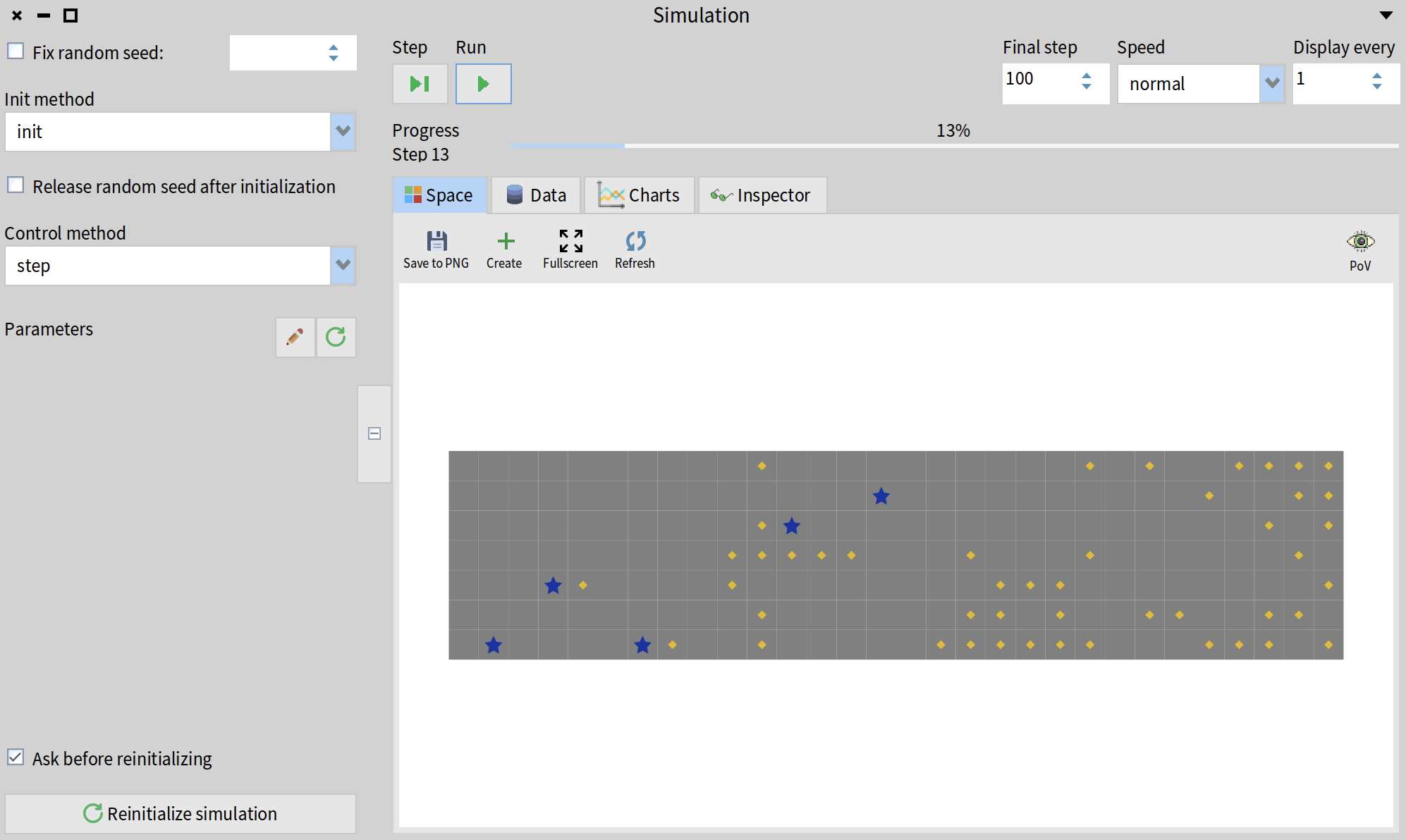
You can now come back to your simulation and click on the "Step" button (1) to perform one step. You can also click on the "Run" button (2) to make the simulation run for the given number of steps at a given speed.
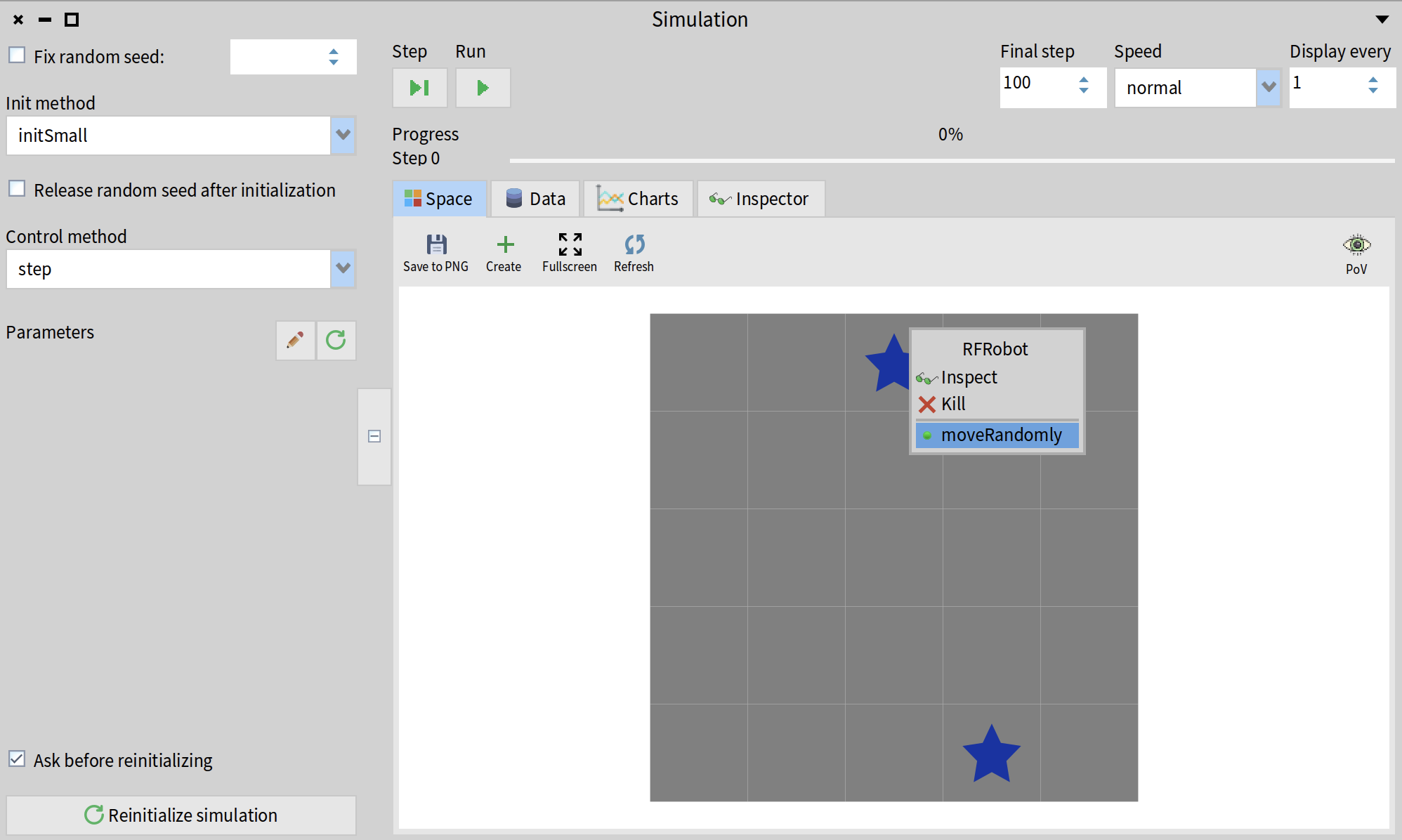
Since we added the <action> pragma to the moveRandomly method, Cormas has added it to the list of actions available to robots. If you right-click on any robot on the spatial grid, a menu will pop-up allowing you to perform this action. You can also "Kill" a robot (destroy it and remove it from the simulation) or drag-n-drop it to a different location.
If you run the simulation long enough, you will notice a problem: sometimes robots move randomly into the same cell, even though, at the very beginning of this tutorial, we have specified that "Multiple robots should never appear on the same cell". To ensure that this doesn't happen, we modify the moveRandomly method and instead of calling the randomWalk method, we will call randomWalkConstrainedBy: - this method acceps a block as an argument allowing us to specify a condition for selecting candidate cells to which an agent can move. We will then use a method of cell called hasOccupantsOfClass: which returns true if the cell has at least one occupant of a given class. We will negate the result using the not method, thus specifying theat the candidate cell must not have any agents of class RFRobot in it.
moveRandomly
<action>
self randomWalkConstrainedBy: [ :aCell |
(aCell hasOccupantsOfClass: RFRobot) not ]
If you run the simulation again, the robots should move randomly but never come to the same cell.
Step 7: Add minerals
In this tutorial, we will define minerals as agents. They will not do anything but this is just a simple way to locate them on a spatial grid. We start by adding a new subclass of CMAgent called RFMineral.
CMAgent << #RFMineral
slots: {};
package: 'RobotForager-Model'
We define a pov method to specify that minerals should have the shape of "diamond" their color should be "gold".
pov
<pov>
^ CMPointOfView
color: CMColor gold
shape: #diamond
Now we add another line at the end of the initSmall method and tell Cormas to create 20 minerals located randomly in the cells that are not occupied by aany other agents.
initSmall
<init>
self
createGridNumberOfRows: 5
numberOfColumns: 5
neighbourhood: 8
closed: true.
self createN: 2 randomlyLocatedAloneEntities: RFRobot.
self createN: 20 randomlyLocatedAloneEntities: RFMineral
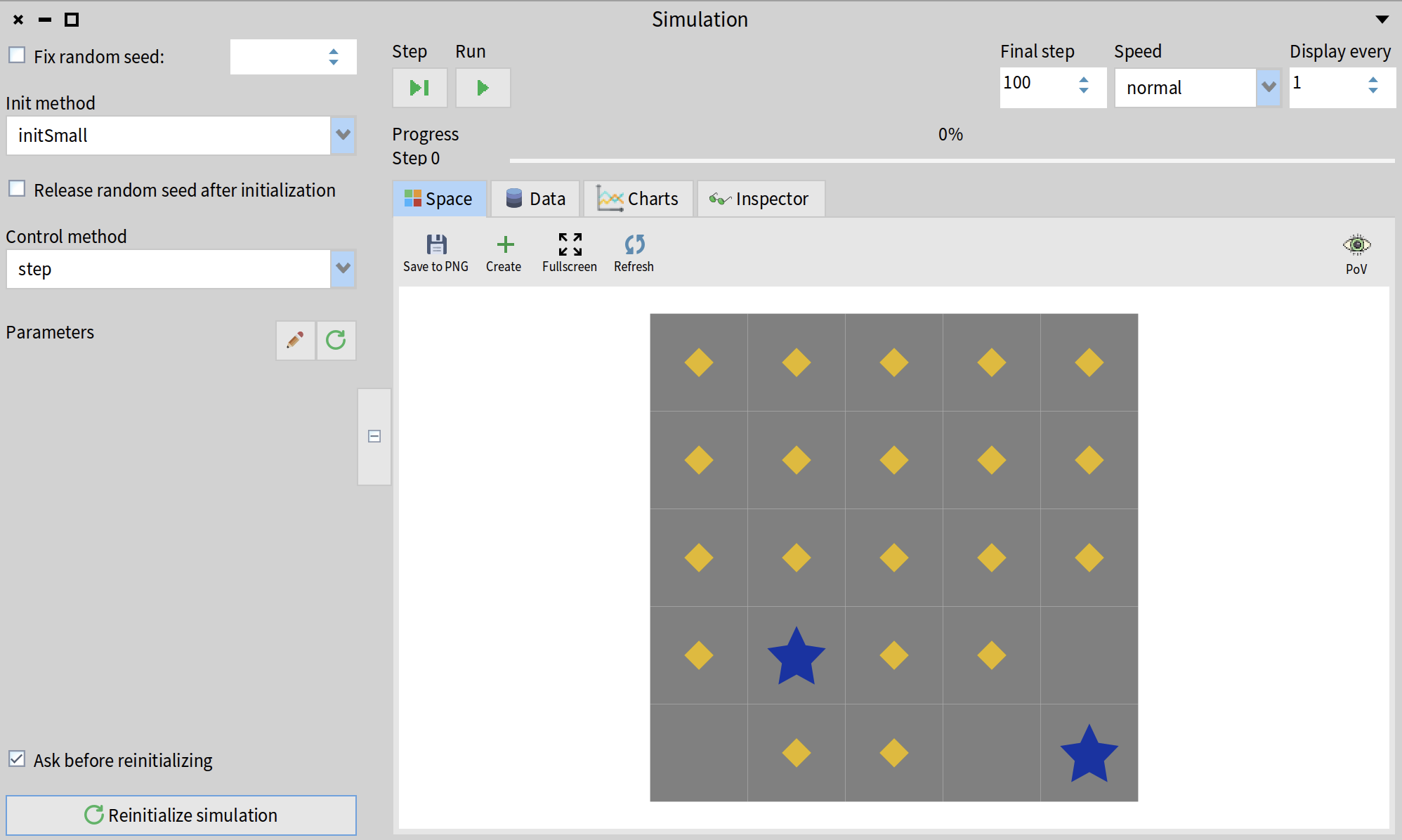
If you re-initialize your simulation now, you should see 20 minerals as well as 2 robots.
We will also add two helper methods to RFCell class that will be useful in the next sections. First, we add a method hasMineral which answers true if the cell has occupants of class RFMineral.
hasMineral
^ self hasOccupantsOfClass: RFMineral
We also define a method getMineral that will return a mineral from the cell. The first line of this method checks if the cell has a mineral on it. If not, it signals an error.
getMineral
self hasMineral ifFalse: [ self error: 'This cell has no minerals' ].
^ (self occupantsOfClass: RFMineral) first
Step 8. Make robots collect the minerals
We start by adding an instance variable collectedMinerals to RFRobot and adding a new initialize method to this class where we assign an empty OrderedCollection to collectedMinerals variable. We will use this collection to store the minerals that the robot has collected.
CMAgent << #RFRobot
slots: { #collectedMinerals };
package: 'RobotForager-Model'
initialize
super initialize.
collectedMinerals := OrderedCollection new
We provide an accessor for this collection because we will need to access it later to measure the number of collected minerals. Pay attention that in this case, we do not add the<getterFor:> pragma. It is only used by the model class to identify collections that should be managed by Cormas and store model entities such as agents or cells.
collectedMinerals
^ collectedMinerals
Now we must define two more actions for our robots: move and collectMineral.
The move action should make the robot look at the neighbouring cells, find one that contains a mineral and move there. If there are no minerals around, robot should move randomly. We access the neighbouring calls by first getting the cell at which a robot is currently located (this cell can be accessed using the cell method) and then calling the neighbourhood method of that cell.
move
<action>
self cell neighbourhood
detect: [ :each | each hasMineral ]
ifFound: [ :each | self moveTo: each ]
ifNone: [ self moveRandomly ]
The collectMineral action should make the robot collect minerals from the cell at which it is currently located. If there are no minerals, the robot should do nothing (^ self is a common way to stop the execution of a method). To collect the mineral, we add it to the collectedMinerals collection and remove it from the grid using the leave method. This method makes the agent leave from its current cell but keeps this agent in the simulation.
collectMineral
<action>
| mineral |
self cell hasMineral ifFalse: [ ^ self ].
mineral := self cell getMineral.
collectedMinerals add: mineral.
mineral leave
Finally, we define the step action for our robots that will first perform the move action and then the collectMineral action.
step
<action>
self move.
self collectMineral
Update the step method of RFModel to call the step method of robots and not the moveRandomly method.
step
<control>
robots do: [ :each | each step ]
Now you can re-initialize your simulation (to make sure that the robots are re-created and their collectedMineral collections are initialized) and click on the "Run" button. Your robots should start collecting minerals now.
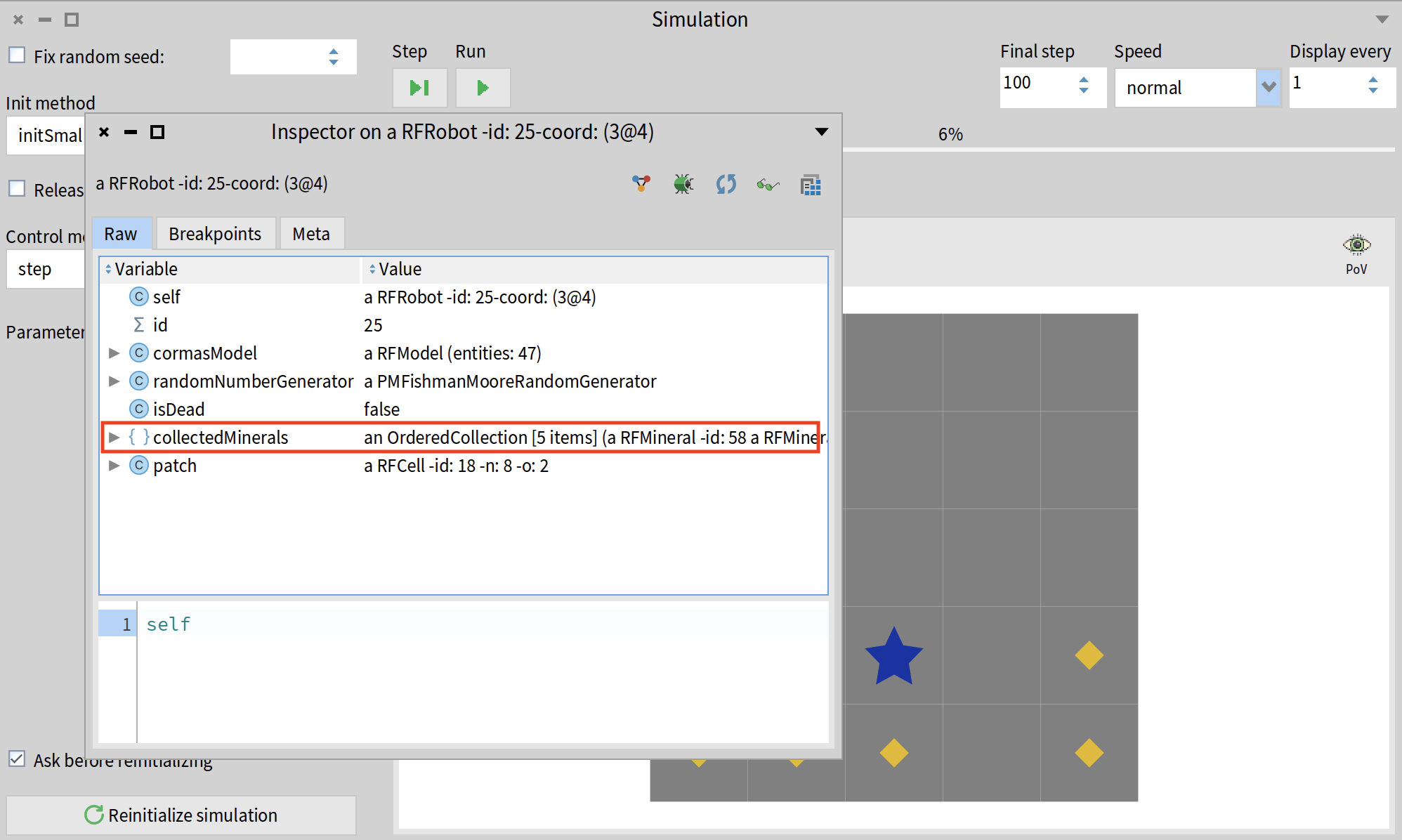
If you right-click on any robot and then click on "Inspect", you should be able to explore the collectedMinerals collection of that robot and see that it contains all the minerals that the robot has collected.
Step 9. Add some probes
Probes are the methods that perform numerical measurements at every step of the simulation. They define the columns of a dataset that will be recorded. In this tutorial, we will add two probes to our model: one to measure the number of collected minerals and another one to measure the number of remaining minerals.
We start by adding a method numberOfCollectedMinerals to RFModel and adding a pragma <probeNamed: color:> to it. This pragma accepts two arguments: the probe name that will be displayed in the dataset and the hex code of a color that will be used for charting.
numberOfCollectedMinerals
<probeNamed: 'Collected minerals' color: '00B44C'>
^ robots sum: [ :each | each collectedMinerals size ]
The hex code in teh method above corresponds to CMColor green. You can get a hex code of any color in Pharo by sending a message asHexString to it. For example:
CMColor green asHexString. "00B44C"
To implement the second probe, we count the number of minerals that are still located on the grid - the ones that have a patch (cell) which is not nil.
numberOfRemainingMinerals
<probeNamed: 'Remaining minerals' color: 'E5B80B'>
^ minerals count: [ :each | each patch isNotNil ]
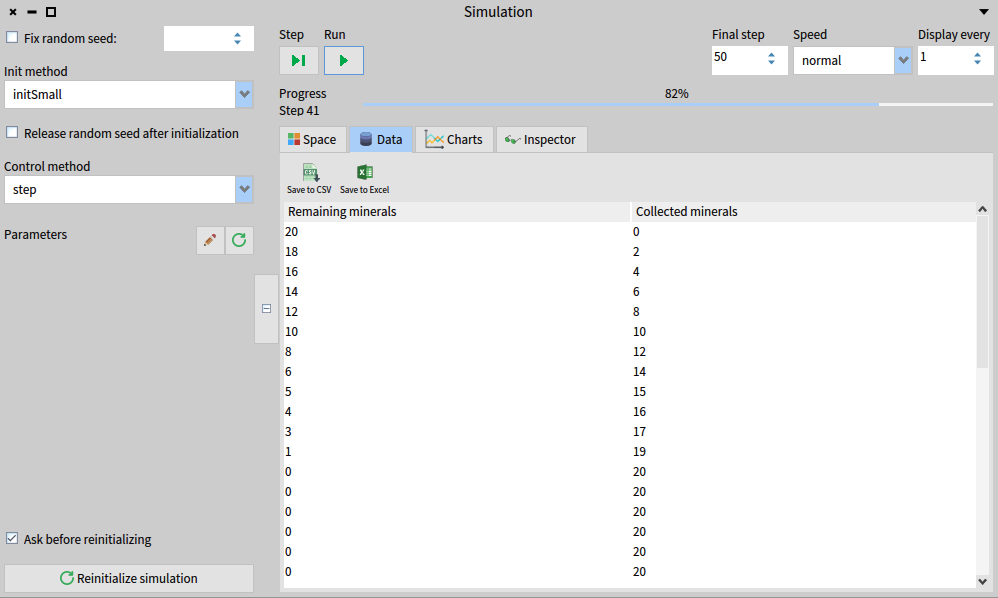
You can now run the simulation and click on the "Data" tab to see the dataset that is being collected.
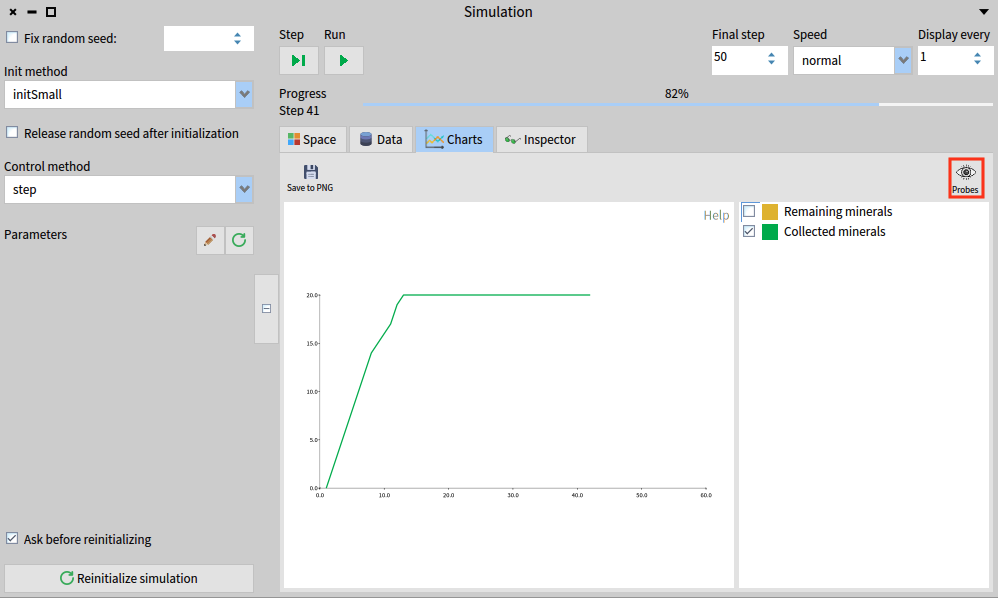
You can also click on the "Charts" tab to get this data visualized.
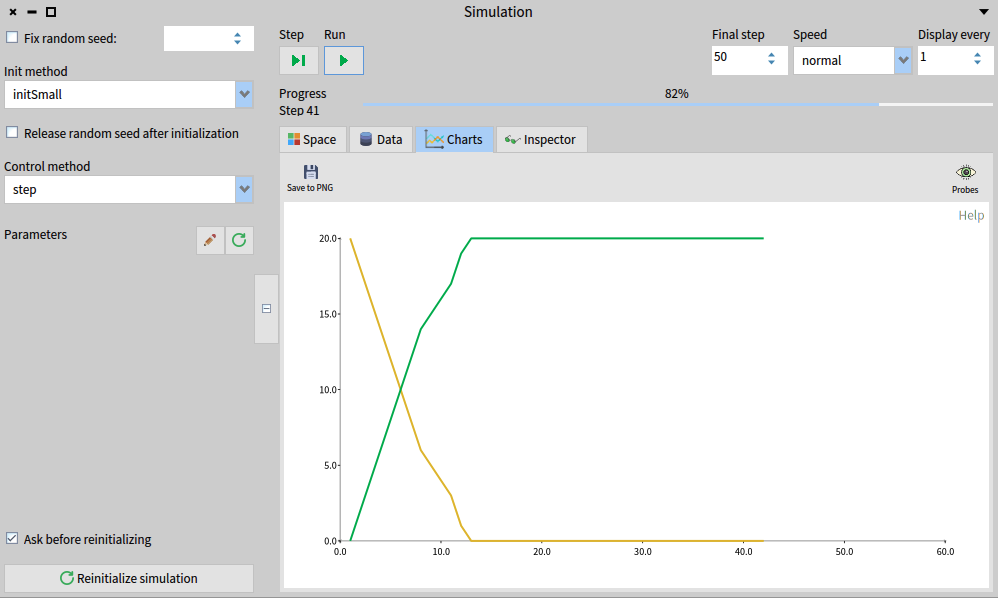
By clicking on the "Probes" button (with the eye icon) in the top right corner of the "Charts" page, you can select or unselect the probes that are being visualized.
Step 10. Define a larger environment
We have implemented a simple 5x5 grid with 2 robots and 20 minerals. Let us now implement a second init method that defines a large environment with 27x27 cells, 10 robots, and 200 minerals. To do that, we simply add another method with <init> pragma to the RFModel.
initLarge
<init>
self
createGridNumberOfRows: 27
numberOfColumns: 27
neighbourhood: 8
closed: true.
self createN: 10 randomlyLocatedAloneEntities: RFRobot.
self createN: 200 randomlyLocatedAloneEntities: RFMineral
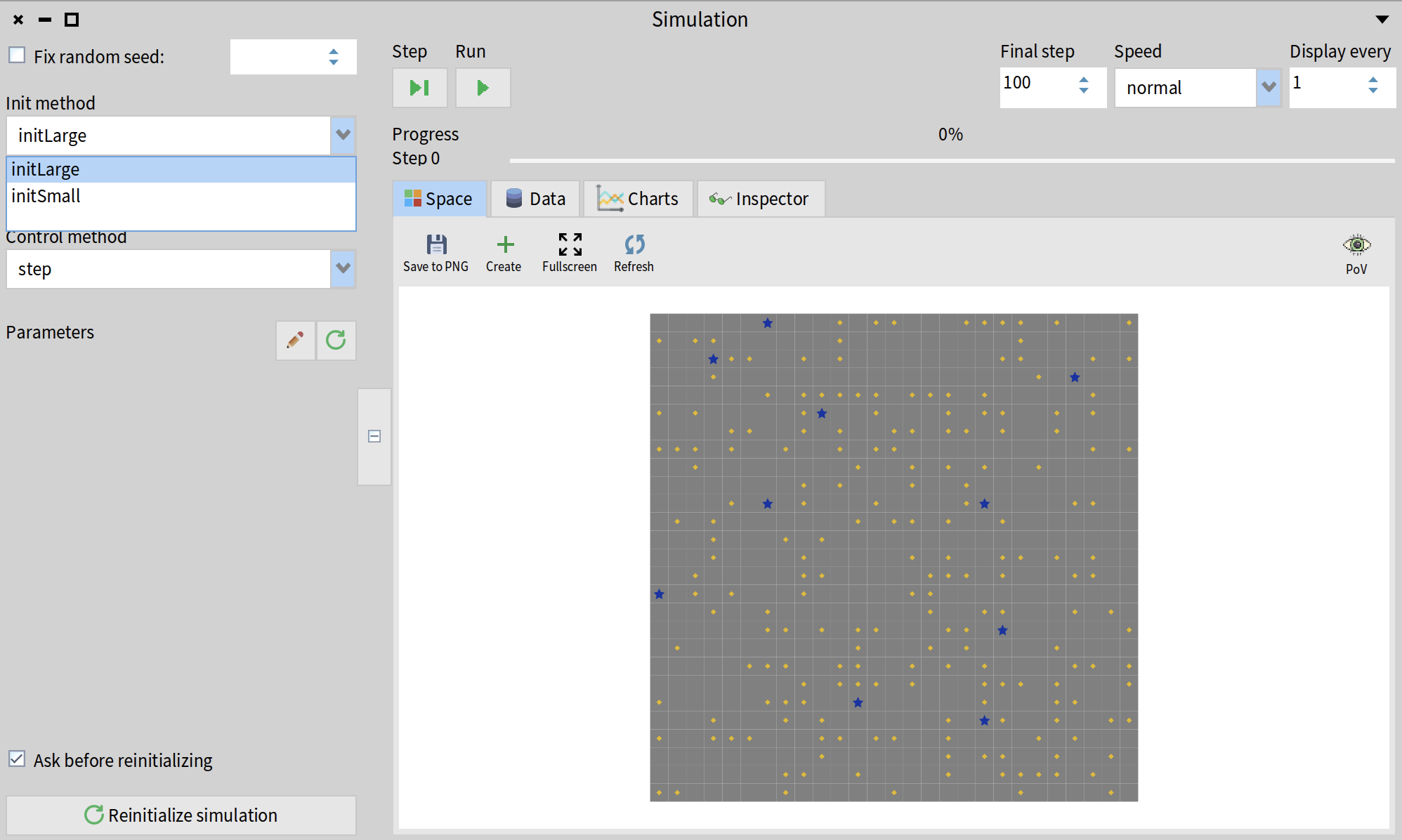
Now you can open your simulation again and select initLarge from the dropdown list of init methods on the left. Initialize the simulation and run the simulation to see the results.
Step 11. Define model parameters
You should have noticed that initSmall and initLarge have the same implementation but different numerical values (fun fact: such numbers inserted directly into the source code are called magic numbers, they are usually considered a bad practice).
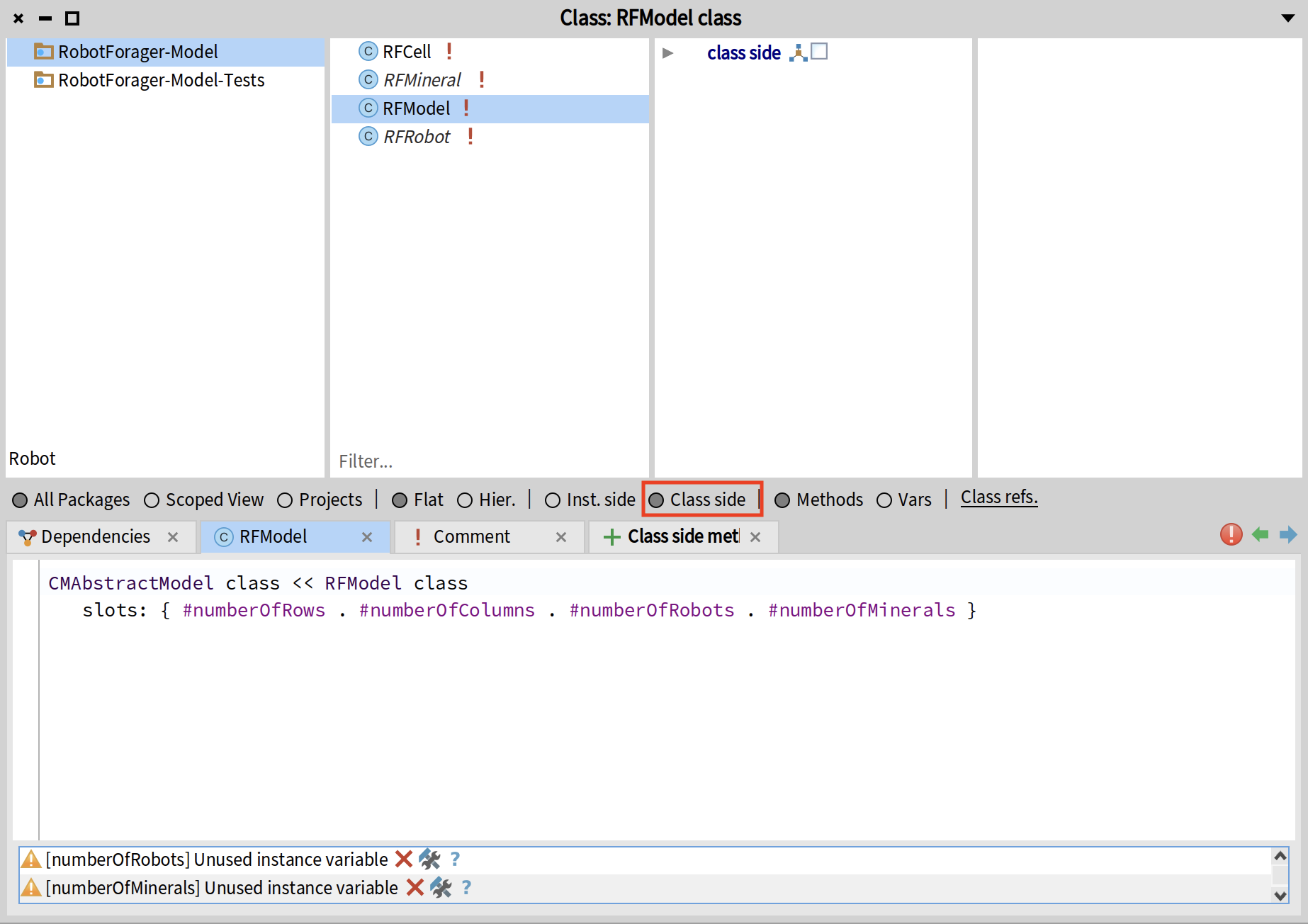
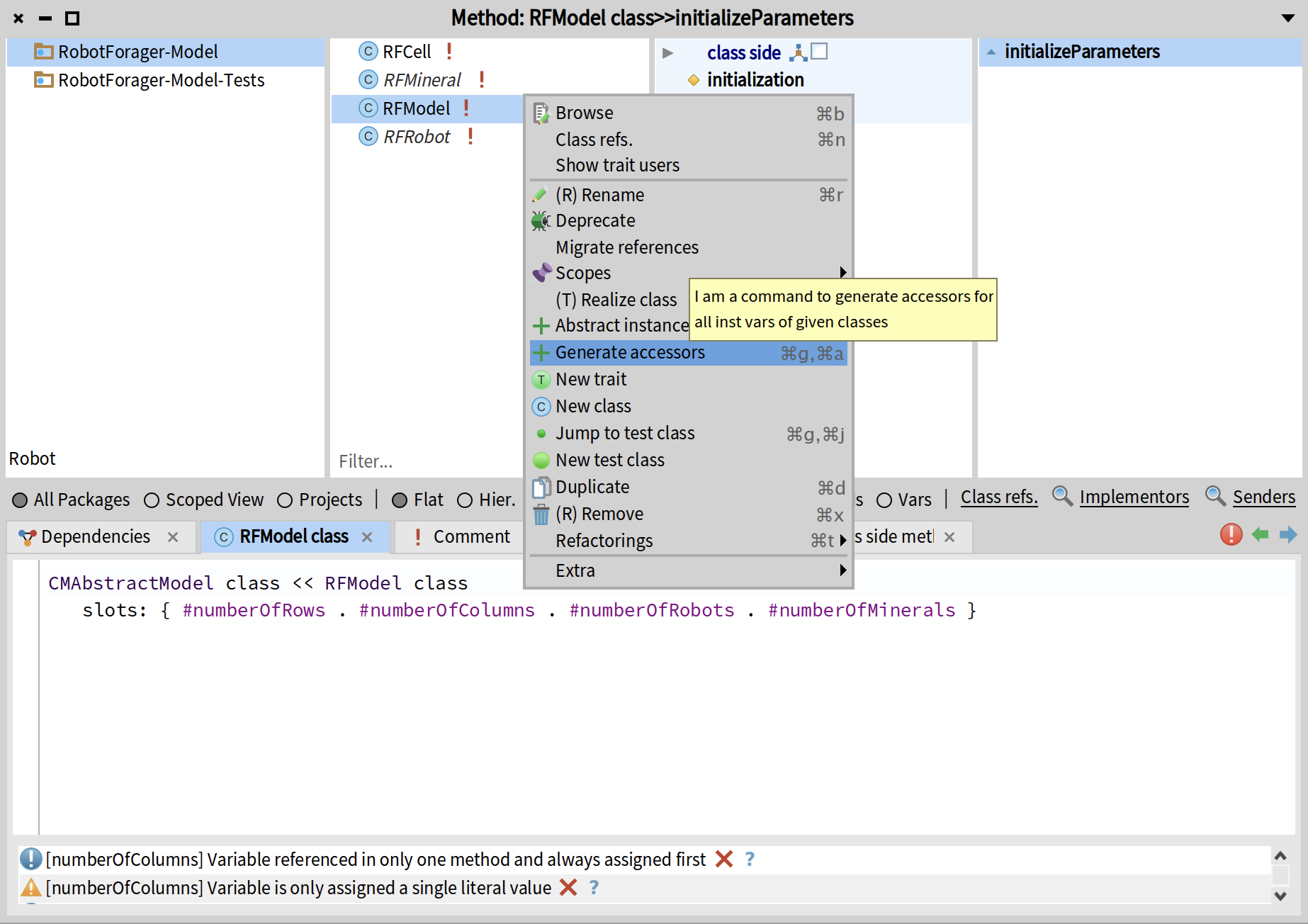
We will replace them with model parameters - named constant values that can be accessed and dynamically modified during the simulation. To do that, we must first create 4 class side variables for our model: numberOfRows, numberOfColumns, numberOfRobots, and numberOfMinerals. Go to the class side by clicking on the "Class side" button in your System Browser. Then add the array of slots to the class definition:
CMAbstractModel class << RFModel class
slots: { #numberOfRows . #numberOfColumns . #numberOfRobots . #numberOfMinerals }
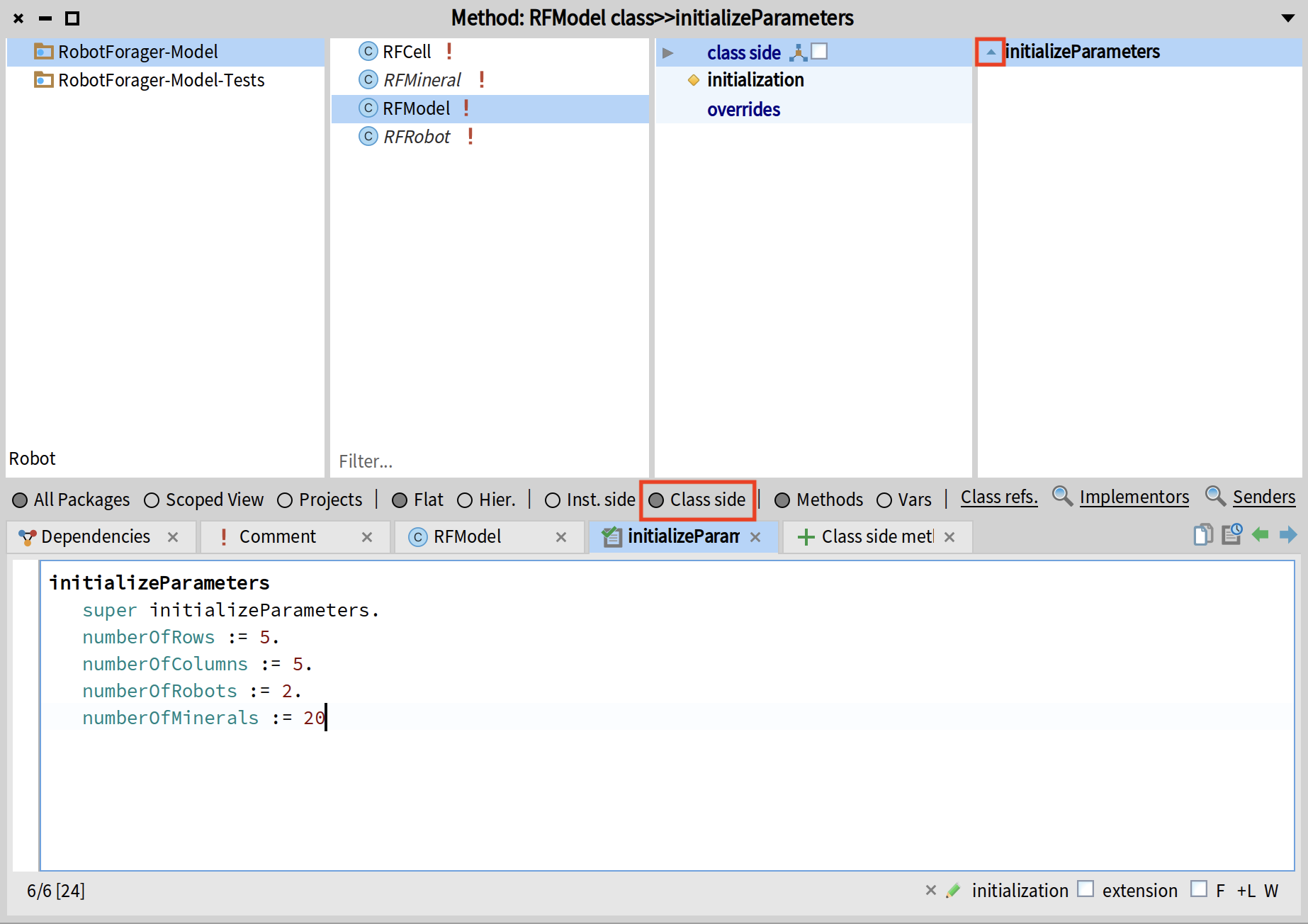
Now, while still on the class side, create a new method called initializeParameters. This is a special method that will be called by Cormas when the model is initialized. The first line of this method must always be super initializeParameters, to make sure that the superclass parameters are also initialized (same principle as for the initialize method of the instance side). In the following lines, provide the default values for each parameter.
initializeParameters
super initializeParameters.
numberOfRows := 5.
numberOfColumns := 5.
numberOfRobots := 2.
numberOfMinerals := 20
Make sure that you create this method on the class side and not the instance side (this is a common mistake!). If you do this correctly, you should see a little arrow near the method name indicating that the method is overriding the superclass implementation. You can click on this arrow to see the method of the superclass.
Now we need to create getter and setter accessors for each parameter. You can do this automatically by right-clicking on the class, selecting "Generate accessors" from the menu and applying all the proposed refactoring changes. Once this is done, you should see 8 new methods: numberOfRows, numberOfRows:, numberOfColumns, etc.
Now we create a parametrized init method that will use the parameters instead of numbers. To access the paramenters, we simply call the corresponding class side getter accessors. For example, we use self class numberOfRows instead of directly writing numbers 5 or 27.
init
<init>
self
createGridNumberOfRows: self class numberOfRows
numberOfColumns: self class numberOfColumns
neighbourhood: 8
closed: true.
self createN: self class numberOfRobots randomlyLocatedAloneEntities: RFRobot.
self createN: self class numberOfMinerals randomlyLocatedAloneEntities: RFMineral
Now you can select the new init method from the list, and modify the parameters before initializing your model. To modify the parameter, click on the little pencil icon (1) on the left side of the Simulation window. This will open a "Parameter Editor" allowing you to select the class which defines your parameter (2) and modify its value (3). Those numbers are editable text fields, so you can simply type the new values and they will be saved.
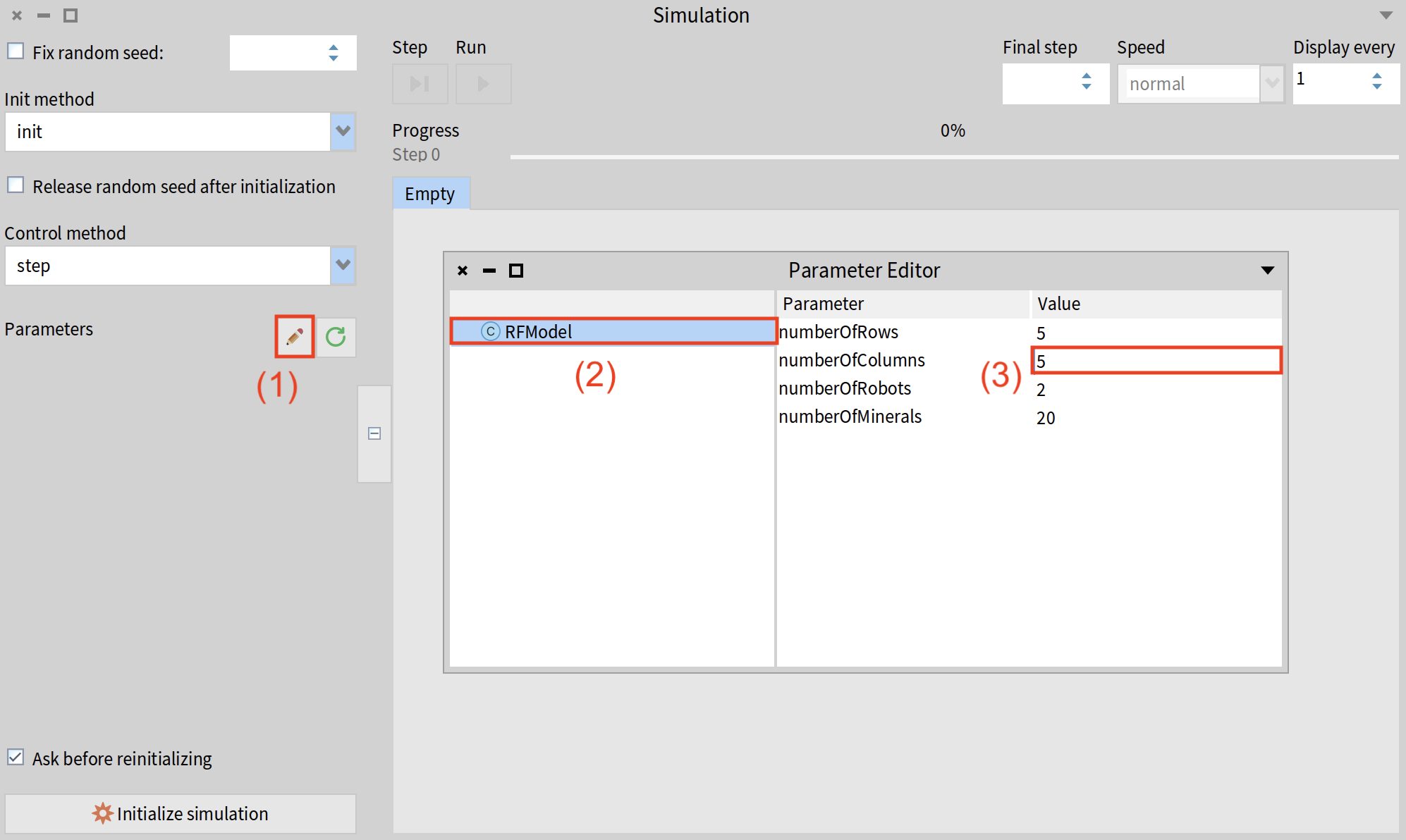
Try it yourself by setting the number of rows to 7, number of columns to 30, number of robots to 5 and number of minerals to 100. Once you have entered the values, you can close the editor, initialize the simulation and run it.
Conclusion
This simple tutorial demonstrated the basic functionality of Cormas, teaching you how to create a simple model and run a simulation. Real-life models are often more complex but the underlying principles remain the same.